
ID : 5364
プログラミング
サンプルプログラムを示します。
- 4軸ロボットの動作を教示するときには、J4の角度が0度近傍となるようにしてください。
- 「最適速度制御設定 (SpeedMode)」は、0:無効か、1:PTPを選択して使用してください。
- コンベアのコマンドは、ティーチチェック時に使用できません。 コンベアのコマンドを実行しようとすると、「82201808 自動モードにしてから実行して下さい」が発生します。
- 複数ロボットの場合、各スレーブはマスターと同じ手順でワークのデータを取得します。
- 同一ワークに対して2回以上追従する場合、キャリブレーション精度の問題でワークが重複登録されている可能性があります。キャリブレーションを再度実施してください。
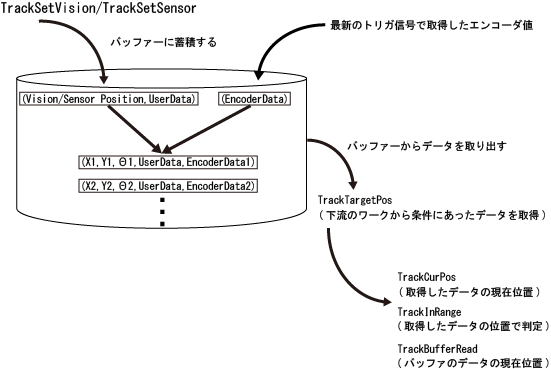
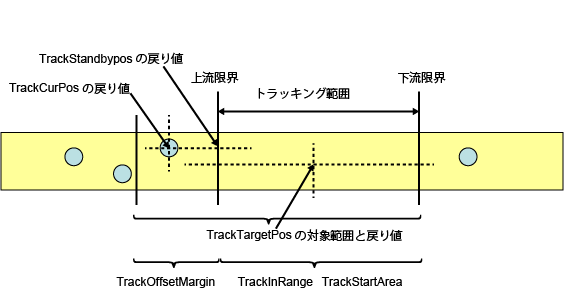
各コマンドの戻り値が示す位置
関連項目
TrackCurPos、TrackInRange、TrackOffsetMargin、TrackStandByPos、TrackTargetPos
ID : 5364