
ID : 3414
デュアルアーム制御機能を使用する場合のプログラミング
ここでは、プログラミングの内容について、下記項目に分けて説明しています。
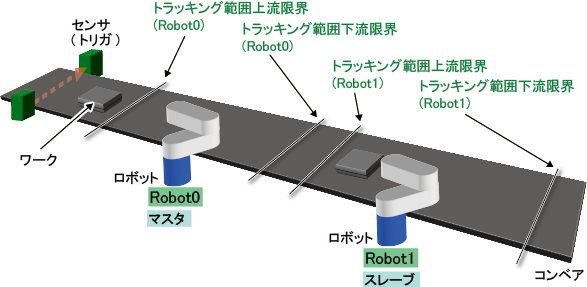
センサトラッキングのプログラミング例
下図のようなシステムのプログラミングを考えます。ワークの大きさは、トラッキング範囲内におさまる大きさとします。
全体構成としては、下図のような構成が考えられます。
(下図に記載されているファイル名は一例です。お客様で任意の名前を付けられます。)
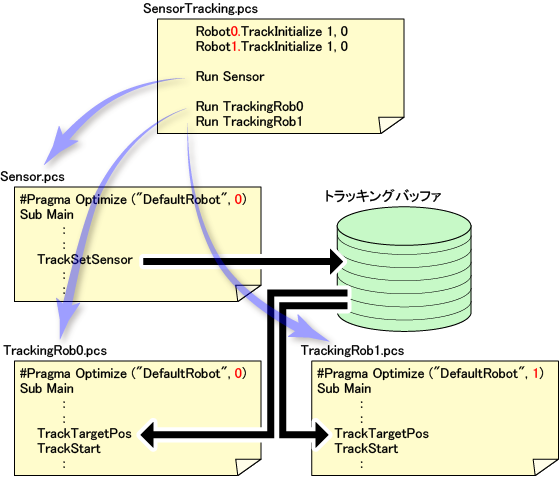
各プログラムファイルの具体例 (サンプルプログラム) と内容の解説を下表に示します。
なお、前提条件として、下記のものがあります。
- コンベアのコンベア番号は1とする。
- センサからのトリガ信号はI/Oポート番号の48に接続されているものとし、立ち上がりで検出する。
|
プログラム名 (サンプルプログラム) |
解説 |
|---|---|
|
コンベアトラッキングシステムを初期化し、他の3つのプログラム を起動するプログラムです。 初期化は、Robot0とRobot1の両方に対して実施します。 コマンドに対する、ロボット名 (Robot0 / Robot1)の指定方法は2種類あります。サンプルプログラムでは、初期化コマンドの"TrackInitialize"の先頭に"Robot0."および、"Robot1."を付けています。 |
|
|
ワーク位置を検出し、トラッキングバッファへの登録を行うプログラムです。 トラッキングバッファへの登録はマスタの役割です。この例の場合、Robot0がマスタなので、Robot0のプログラムとして記述します。 サンプルプログラムでは、下記の1行をプログラムの先頭に記述することによって、Robot0のプログラムとしています。 |
|
|
トラッキングバッファからワークの位置を読み出し、Robot0にトラッキングとピックアップ動作を行わせるプログラムです。 サンプルプログラムでは、下記の1行をプログラムの先頭に記述することによって、Robot0のプログラムとしています。 |
|
|
トラッキングバッファからワークの位置を読み出し、Robot1にトラッキングとピックアップ動作を行わせるプログラムです。 サンプルプログラムでは、下記の1行をプログラムの先頭に記述することによって、Robot1のプログラムとしています。 |
ロボット名 (Robot0 / Robot1)の指定方法の詳細については、 "予備知識 (マスタとスレーブの概念)" の "トラッキングバッファへのデータ登録" を参照してください。
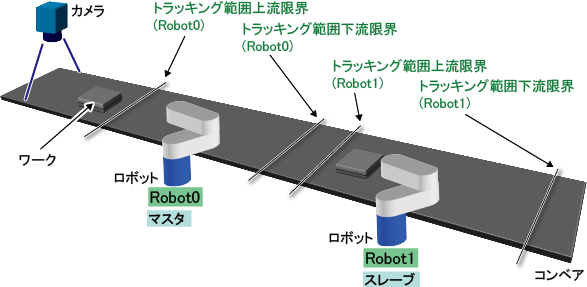
ビジョントラッキングのプログラミング例
下図のようなシステムのプログラミングを考えます。ワークの大きさは、トラッキング範囲内におさまる大きさとします。
全体構成としては、下図のような構成が考えられます。
(下図に記載されているファイル名は一例です。お客様で任意の名前を付けられます。)
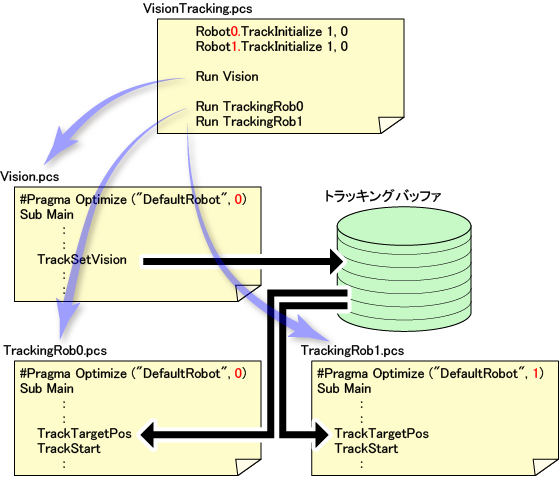
各プログラムファイルの具体例 (サンプルプログラム) と内容の解説を下表に示します。
なお、前提条件として、下記のものがあります。
- コンベアのコンベア番号は1とする。
|
プログラム名 (サンプルプログラム) |
解説 |
|---|---|
|
コンベアトラッキングシステムを初期化し、他の3つのプログラム を起動するプログラムです。 初期化は、Robot0とRobot1の両方に対して実施します。 コマンドに対する、ロボット名 (Robot0 / Robot1)の指定方法は2種類あります。サンプルプログラムでは、初期化コマンドの"TrackInitialize"の先頭に"Robot0."および、"Robot1."を付けています。 |
|
|
ワーク位置を検出し、トラッキングバッファへの登録を行うプログラムです。 トラッキングバッファへの登録はマスタの役割です。この例の場合、Robot0がマスタなので、Robot0のプログラムとして記述します。 サンプルプログラムでは、下記の1行をプログラムの先頭に記述することによって、Robot0のプログラムとしています。 |
|
|
トラッキングバッファからワークの位置を読み出し、Robot0にトラッキングとピックアップ動作を行わせるプログラムです。 サンプルプログラムでは、下記の1行をプログラムの先頭に記述することによって、Robot0のプログラムとしています。 |
|
|
トラッキングバッファからワークの位置を読み出し、Robot1にトラッキングとピックアップ動作を行わせるプログラムです。 サンプルプログラムでは、下記の1行をプログラムの先頭に記述することによって、Robot1のプログラムとしています。 |
ロボット名 (Robot0 / Robot1)の指定方法の詳細については、 "予備知識 (マスタとスレーブの概念)" の "トラッキングバッファへのデータ登録" を参照してください。
その他のプログラミング例
コンベアトラッキングのプログラミング例として、 "長尺ワークに対するプログラムミング例" や、 "トラッキングでの自由曲線補間のプログラム例" などがあります。これらはロボット1台を使用したときの例ですが、Robot0やRobot1の指定を行えば、部分的に流用することができます。"プログラミング" の下の階層にあるコンテンツ(上記コンテンツなど)も参考にしてください。
ID : 3414