
ID : 5304
システム構成
全体システム構成
下図のようにモータケーブルをMC8シリーズのモータコネクタに直接接続します。エンコーダケーブルはエンコーダハブを介してMC8シリーズに接続します。
モータケーブルを接続するモータコネクタのSLOT番号は、モータの組合わせにより決められて出荷されます。
コントローラ天板のラベルに記載されていますので、ラベルの内容を確認し、接続してください。
- 接続する際の注意事項については、付加軸取扱説明書の「ケーブルの接続」を参照してください。
- エンコーダハブのコネクタからモータのコネクタまでの、各軸のエンコーダケーブルの総長は最大16mです。 また、コントローラ(MC8シリーズ)のコネクタからモータのコネクタまでの、各軸のモータケーブルの総長は最大16mで、全軸の合計は最大96mです。
- 安全のため、および機器の故障防止のため、ケーブルを抜いたり、接続する前に、コントローラの電源ケーブルを抜くか、設備側からコントローラへの給電を遮断してください。
- MC8シリーズシステムの接続状態によっては、接触電流が3.5mAを超えます。前面のアースターミナル(保護接地)には、2.5mm^2以上の緑/黄色線で接地した後で、電源ケーブルを接続してください。
- システムで使用する各製品は防塵防滴製品ではありません。防塵防滴性能が必要な環境では使用できません。
UL仕様以外
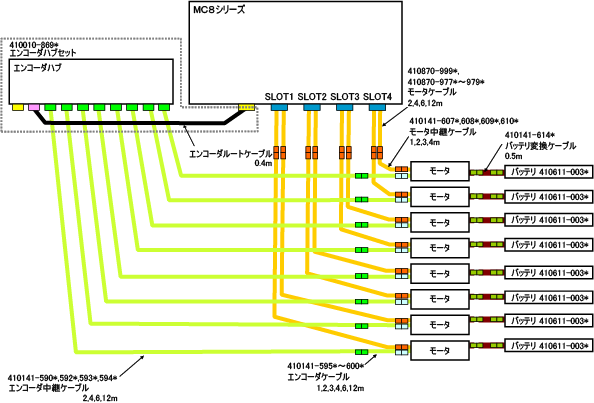
図が見にくい場合はこちらをご覧ください。(PDF:233KB)
UL仕様
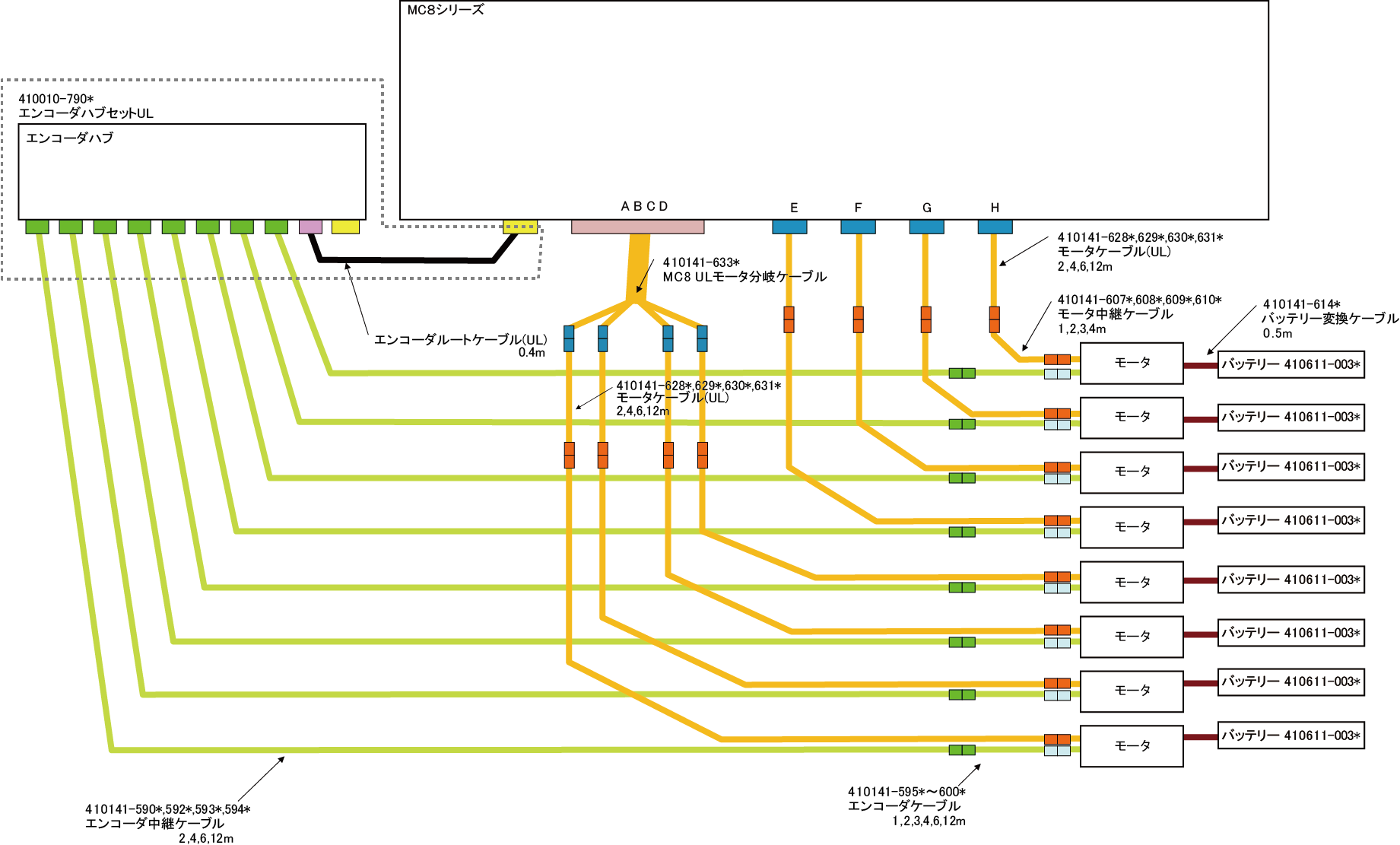
図が見にくい場合はこちらをご覧ください。(PDF:203KB)
コントローラ
コントローラ各部の名称、外形寸法
MC8シリーズのコントローラ各部の名称および外形寸法は、RC8シリーズロボットコントローラと同じです。
MC8AはRC8Aロボットコントローラの「コントローラ各部の名称」および「コントローラ外形寸法」を、MC8はRC8ロボットコントローラの「コントローラ各部の名称」および「コントローラ外形寸法」を参照してください。
| タイトル | 参照先 | |
|---|---|---|
| コントローラ各部の名称 | MC8A | RC8Aコントローラ各部の名称 |
| MC8 | RC8コントローラ各部の名称 | |
| コントローラ外形寸法 | MC8A | 標準、セーフティモーション |
| MC8 | 標準、セーフティI/Oレス | |
コントローラの仕様
MC8シリーズの仕様は下記を除きRC8シリーズロボットコントローラと同じです。
| 項目 | 仕様 |
|---|---|
| 入力電圧範囲 | 3相 AC200V - 15% ~ AC240V + 10% |
| 制御方式 | CP3次元直線、3次元円弧(直交ロボット構成時) |
MC8AはRC8Aロボットコントローラの「コントローラの仕様」を、MC8はRC8ロボットコントローラの「コントローラの仕様」を参照してください。
| タイトル | 参照先 | |
|---|---|---|
| コントローラの仕様 | MC8A | 標準/セーフティモーション、セーフティI/Oレス |
| MC8 | 標準、セーフティI/Oレス | |
I/O割付
MC8シリーズのI/O割付は、RC8シリーズロボットコントローラと同じです。RC8シリーズの「インタフェースの概要」を参照してください。
Mini I/Oの割付については、RC8AとRC8で異なりますので、MC8Aは「RC8A Mini I/O取扱説明書」を、MC8は「RC8 Mini I/O取扱説明書」を参照してください。
MC8シリーズの駆動能力
駆動可能なACサーボモータ容量を下表に示します。
| MC8シリーズ | モータ容量 | 合計駆動能力 |
|---|---|---|
| 1~8軸 | 1000W以下/軸 | 3000W以下 |
ACサーボモータは指定品を使用してください。付加軸オプション使用時も合計駆動能力は同じです。
ロボット動作時のエラーについて
ロボット動作時にエラー(過負荷、偏差過大、バス電圧低下など)が発生した場合、以下の調整を行うか、エラーコード一覧の内容に従って処置してください。
- 動作前、動作後の待ち時間を増やす。
- 速度、加速度を下げる。
エンコーダハブ
エンコーダハブは付加軸仕様で使用するものと同じです。
詳細については、付加軸取扱説明書の「エンコーダハブ」を参照してください。
モータ
MC8シリーズで使用できるモータは付加軸仕様のモータと同じです。
詳細については、付加軸取扱説明書の「サーボ機構の設計方法」、「ACサーボモータの選定」を参照してください。
ID : 5304