
ID : 2351
RC8Aコントローラ各部の名称
UL仕様以外
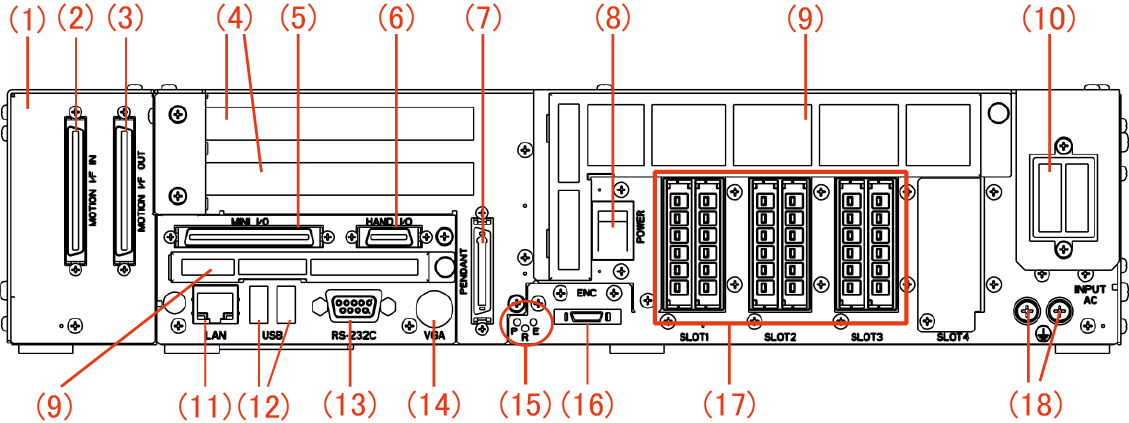
| 番号 | 表示 | 名称 | 用途 | 備考 | ||
|---|---|---|---|---|---|---|
| 1 | - | セーフティモーション | セーフティモーション用の入出力コネクタを持つユニットです。 セーフティモーション仕様のみ付属します。 |
*1 | ||
| 2 | MOTION I/F IN | セーフティモーション入力用コネクタ | セーフティモーションの入力用ケーブルを接続します。 | *1, *2 | ||
| 3 | MOTION I/F OUT | セーフティモーション出力用コネクタ | セーフティモーションの出力用ケーブルを接続します。 | *1, *2 | ||
| 4 | - | 拡張ボードスロット(2スロット) | 拡張ボートを装着します。 上段にPCIボード、下段にPCI Expressボードを装着できます。 |
|||
| 5 | MINI I/O | Mini I/O用コネクタ | *2 | |||
| 6 | HAND I/O | Hand I/O用コネクタ | *2 | |||
| 7 | PENDANT | ペンダント用コネクタ | ティーチングペンダントやミニペンダントを装着します。 | *3 | ||
| 8 | POWER | 電源スイッチ | コントローラの電源入り・切りに使用します。 | |||
| 9 | - | 吸気フィルタ | コントローラ内部への塵埃進入防止用です。2箇所あります。 | |||
| 10 | INPUT AC | 電源コネクタ | 電源ケーブルを接続します。 | *2 | ||
| 11 | LAN | Ethernet用コネクタ | 外部機器とのEthernet回線による通信に使用します。 | |||
| 12 | USB | USB用コネクタ(2回線) | USBメモリやUSB機器と接続できます。 | |||
| 13 | RS-232C | シリアル通信用コネクタ | 外部機器とのシリアル通信に使用します。 | |||
| 14 | VGA | VGA用コネクタ | 画像の出力に使用します。 (オプション) |
|||
| 15 | P(POWER) R(RUN) E(ERR) |
状態表示LED | コントローラの状態が確認できます。 | |||
| POWER | コントローラ電源ON | 緑色点灯 | ||||
| 電源OFF | 消灯 | |||||
| RUN | 自動モードでプログラム実行中 | 緑色点灯 | ||||
| その他 | 消灯 | |||||
| ERROR | ロボット異常&ロボット警告 (エラーレベル表を参照ください) |
赤色点灯 | ||||
| その他 | 消灯 | |||||
| 16 | ENC | エンコーダコネクタ | エンコーダケーブルを接続します。 | *2 | ||
| 17 | SLOT1, SLOT2, SLOT3, SLOT4 | モータコネクタ | モータケーブルを接続します。 | *2 | ||
| 18 |  |
アースターミナル(保護接地) | 感電防止 | *2 | ||
*1 セーフティモーション仕様のみ
*2 コントローラにAC電源またはI/O用DC24V電源を印加中はコネクタの脱着をしないでください。感電及び故障の原因になります。 また、コネクタを抜く際は、電源遮断後、6秒待ってから行ってください。
*3 ティーチングペンダントのコネクタを接続する際は、ロボットコントローラの電源を落とした状態で行ってください。ロボットコントローラの電源を落とさずにティーチングペンダントのコネクタを接続すると、ティーチングペンダントおよびロボットコントローラが故障する可能性があります。
また、ティーチングペンダントのコネクタを取り外す際は、切断処理を行ってください。切断処理は「ペンダント・操作盤の設定メニューの表示」を参照してください。
UL仕様
| 番号 | 表示 | 名称 | 用途 | 備考 | ||
|---|---|---|---|---|---|---|
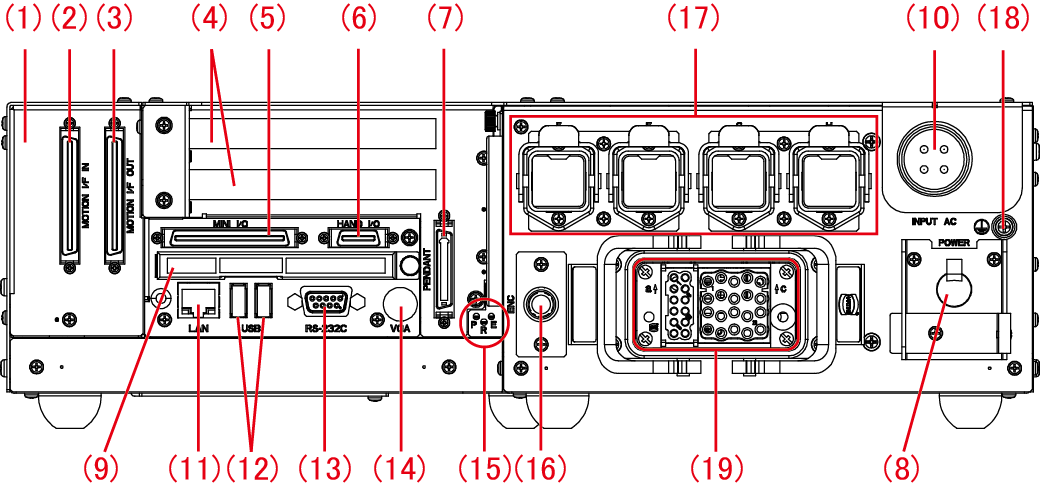
| 1 | - | セーフティモーション | セーフティモーション用の入出力コネクタを持つユニットです。 セーフティモーション仕様のみ(2)(3)が付属します。 |
*1 | ||
| 2 | MOTION I/F IN | セーフティモーション入力用コネクタ | セーフティモーションの入力用ケーブルを接続します。 | *1, *2 | ||
| 3 | MOTION I/F OUT | セーフティモーション出力用コネクタ | セーフティモーションの出力用ケーブルを接続します。 | *1, *2 | ||
| 4 | - | 拡張ボードスロット(2スロット) | 拡張ボートを装着します。 上段にPCIボード、下段にPCI Expressボードを装着できます。 |
|||
| 5 | MINI I/O | Mini I/O用コネクタ | *2 | |||
| 6 | HAND I/O | Hand I/O用コネクタ | *2 | |||
| 7 | PENDANT | ペンダント用コネクタ | ティーチングペンダントやミニペンダントを装着します。 | *3 | ||
| 8 | POWER | 電源スイッチ | コントローラの電源入り・切りに使用します。 | |||
| 9 | - | 吸気フィルタ | コントローラ内部への塵埃進入防止用です。2箇所あります。 | |||
| 10 | INPUT AC | 電源コネクタ | 電源ケーブルを接続します。 | *2 | ||
| 11 | LAN | Ethernet用コネクタ | 外部機器とのEthernet回線による通信に使用します。 | |||
| 12 | USB | USB用コネクタ(2回線) | USBメモリやUSB機器と接続できます。 | |||
| 13 | RS-232C | シリアル通信用コネクタ | 外部機器とのシリアル通信に使用します。 | |||
| 14 | VGA | VGA用コネクタ | 画像の出力に使用します。 (オプション) |
|||
| 15 | P(POWER) R(RUN) E(ERR) |
状態表示LED | コントローラの状態が確認できます。 | |||
| POWER | コントローラ電源ON | 緑色点灯 | ||||
| 電源OFF | 消灯 | |||||
| RUN | 自動モードでプログラム実行中 | 緑色点灯 | ||||
| その他 | 消灯 | |||||
| ERROR | ロボット異常&ロボット警告 (エラーレベル表を参照ください) |
赤色点灯 | ||||
| その他 | 消灯 | |||||
| 16 | - | エンコーダコネクタ(付加軸用) | エンコーダHUB用のエンコーダケーブルを接続します。 付加軸仕様の場合のみ、コネクタが装着されます。 |
*2 | ||
| 17 | - | モータコネクタ(付加軸用) | 付加軸モータ用のモータケーブルを接続します。 付加軸仕様の場合のみ、コネクタ(4個)が装着されます。 |
*2 | ||
| 18 | |
アースターミナル(保護接地) | 感電防止 | *2 | ||
| 19 | - | 本体間ケーブル用コネクタ | 本体間ケーブルを接続します。 | *2 | ||
*1 セーフティモーション仕様のみ
*2 コントローラにAC電源またはI/O用DC24V電源を印加中はコネクタの脱着をしないでください。感電及び故障の原因になります。 また、コネクタを抜く際は、電源遮断後、6秒待ってから行ってください。
*3 ティーチングペンダントのコネクタを接続する際は、ロボットコントローラの電源を落とした状態で行ってください。ロボットコントローラの電源を落とさずにティーチングペンダントのコネクタを接続すると、ティーチングペンダントおよびロボットコントローラが故障する可能性があります。
また、ティーチングペンダントのコネクタを取り外す際は、切断処理を行ってください。切断処理は「ペンダント・操作盤の設定メニューの表示」を参照してください。
ID : 2351