
ID : 5288
サーボ機構の設計方法
メカニズムの例
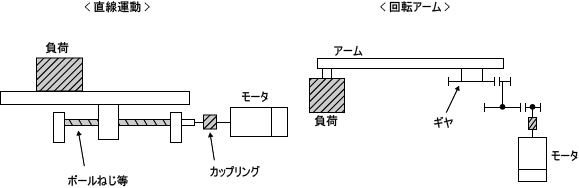
メカニズムの機構は、下図のように直線運動と回転アームに分けられます。
駆動系の選定
スティック、スリップ等で急激なトルク変動がある場合、適切な制御を行なえません。下表に代表的な駆動系の適、不適な例を示します。
| 駆動系 | 条件 | 適、不適 |
|---|---|---|
| ボールねじ | 研削・・・ガタ小 | ○ |
| 転造・・・ガタ大(制御的に不安定) | △ | |
| 歯車 | 研削・・・精度1級以上・・・ガタ小 | ○ |
| 切削・・・精度3級以上・・・ガタ中 | △ | |
| 切削・・・精度4級以下・・・ガタ大 | × | |
| スクリュー軸 | 摩擦大 | × |
| ハーモニックドライブ | 摩擦大(選定に注意) | △ |
| スライド部軸受 | リニアモーションベアリング | ○ |
| LMガイド | ○ | |
| すべり軸受け・・・摩擦大 | × | |
| シール、パッキン | 摩擦がモータ軸換算で定格トルクの20%以下 | △ |
| 摩擦がモータ軸換算で定格トルクの20%以上 | × |
ID : 5288
- このページに関連する情報
- 設計例(高速搬送装置)
- 設計上の注意事項