
ID : 5303
概要
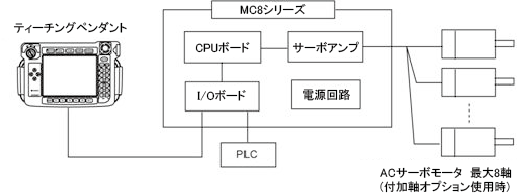
MC8シリーズは、X-Yテーブル等、ACサーボモータ駆動の位置決め機構を制御するためのコントローラです。
MC8シリーズを使用したシステムの例を下図に示します。まず、ティーチングペンダントを用いてX-Yテーブル等を動作させて位置を記憶させます。また、同時に外部装置と同期のための条件なども記憶させます。その後、自動運転を行なうとメモリに記憶されたデータを読みだしながらX-Yテーブル等はプログラムされた動作を行ないます。なお、操作方法はRC8シリーズロボットコントローラ搭載のロボットと同じです。
MC8シリーズについて
MC8シリーズには、MC8AとMC8の2種類があります。
MC8Aの仕様などはRC8Aロボットコントローラと基本的に同じです。
MC8の仕様などはRC8ロボットコントローラと基本的に同じです。
型式については、RC8シリーズの「コントローラ型式」を参照してください。
ただし、区分Aと区分Bのコードは、下表になります。
| コントローラ | 区分A | 区分B |
|---|---|---|
| MC8A | RC8A | MC81 |
| MC8 | RC8 | MC81 |
機能、使用上の注意
MC8シリーズの機能は、基本的にはロボット用コントローラと同じですが、アーム機構が特定できないため、下記の動作やコマンドを使用すると、予期しない動きをする恐れがありますので、注意してください。
- CP動作(直線補間 MOVE Lや円弧補間 MOVE C)
- TOOL動作
- ROTATEコマンド
- 座標指示動作(DRAW)
- PALTコマンド
- APPROACHコマンド
- DEPARTコマンド
- 自由曲線補間動作 Move S
ID : 5303
- このページに関連する情報
- 梱包品の構成
- システム構成
- システムを安全に使用していただくためのご注意
- 出荷時のコントローラ設定