
ID : 3331
その他の組合せ
ここで説明するロボットの組合せは以下の組合せです。
- RC8シリーズ用ロボット + MC8シリーズ制御ロボット
- MC8シリーズ制御ロボット × 2 内部軸と外部軸の混成
- MC8シリーズ制御ロボット × 2 外部軸のみ
上記ロボットの組合せでは、購入直後、RC8シリーズロボットコントローラ(以降 RC8シリーズ)または、MC8シリーズモーションコントローラ(以降 MC8シリーズ)には、ロボット1台分のデータ ("プロジェクトデータ")しか入っていません。
したがって、ロボット2台分のプロジェクトデータを作成し、RC8シリーズまたは、MC8シリーズに送信する必要があります。
上記内容も含め、全体的なセットアップの手順を下記に示します。
| 実施項目 | 概要 |
|---|---|
| 1. 配線 | RC8シリーズまたはMC8シリーズに、ロボットや内部軸のモータ、ティーチングペンダントなどを接続します。 |
| 2. ソフトウェアライセンスの登録 | RC8シリーズまたはMC8シリーズに、ソフトウェアライセンスを登録します。 |
| 3. ロボット2台分のプロジェクトデータの作成 | RC8シリーズまたはMC8シリーズからプロジェクトデータを受信し、そのデータにもう1台分のプロジェクトデータを追加します。 |
| 4. ロボット制御用のプロジェクトデータを変換 | キネマティクス設定ツールを使用して、MC8シリーズのプロジェクトデータをロボット制御用のプロジェクトデータに変換します。 |
| 5. プロジェクトデータの送信 | RC8シリーズまたはMC8シリーズへ2台分のプロジェクトデータを送信します。 |
以下、各実施項目について説明します。
1. 配線
RC8シリーズまたはMC8シリーズに、ロボットや内部軸のモータ、ティーチングペンダント、電源ケーブルなど、必要な機器を接続します。
"システム構成"の下記参照先のうち、購入されたロボットの組合せの参照先を参考にして、配線を実施してください。
2. ソフトウェアライセンスの登録
RC8シリーズまたはMC8シリーズにあらかじめソフトウェアライセンスが登録されている場合は、次の"ロボット2台分のプロジェクトデータの作成"にお進みください(ソフトウェアライセンスが登録済みのRC8シリーズまたはMC8シリーズを購入した場合など)。
まだ、ソフトウェアライセンスが登録されていない場合、RC8シリーズまたはMC8シリーズにティーチングペンダントを接続して、デュアルアーム制御用ライセンスを登録します。必要に応じ、キネマティクス機能のライセンスや、その他のライセンスも登録します。
登録方法については、"ティーチングペンダント操作ガイド"の"機能拡張画面の表示、追加/削除"を参照してください。
3. ロボット2台分のプロジェクトデータの作成
RC8シリーズまたはMC8シリーズからプロジェクトデータを受信し、そのデータにもう1台分のプロジェクトデータを追加します。
方法として、下記の2種類があります。
協調制御·デュアルアームツールは、WINCAPSIIIをインストールするときに、同時にインストールされるソフトウェアです。
以下、各方法について説明します。
協調制御·デュアルアームツールのみを使用する方法
以下の手順で行います。
1
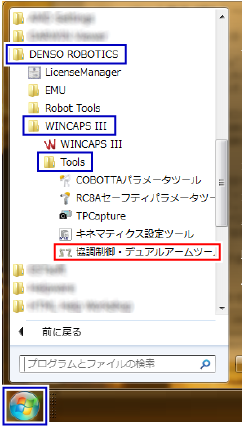
協調制御·デュアルアームツールを起動します。
操作経路:PC[スタート]ボタン - [すべてのプログラム] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [協調制御·デュアルアーム] |
2
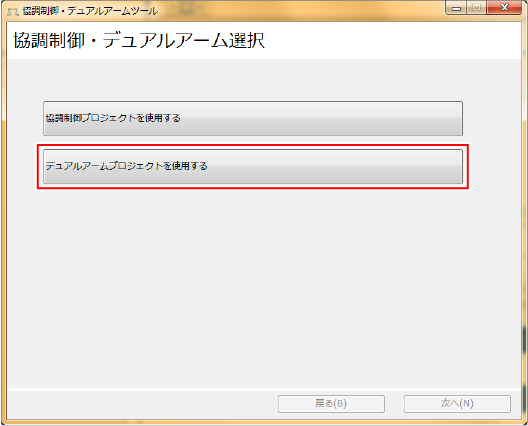
"デュアルアームプロジェクトを使用する”を選択します。
3
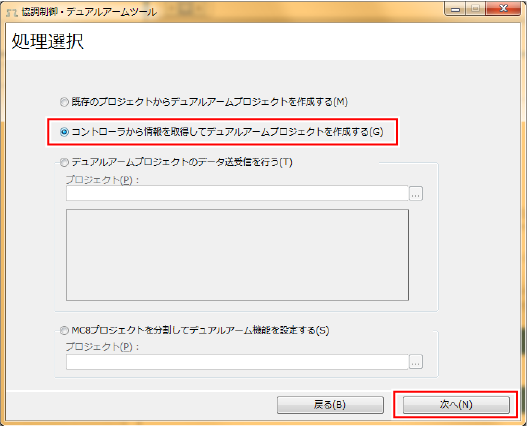
"コントローラから情報を取得してデュアルアームプロジェクトを作成する"を選択して、[次へ]をクリックします。
4
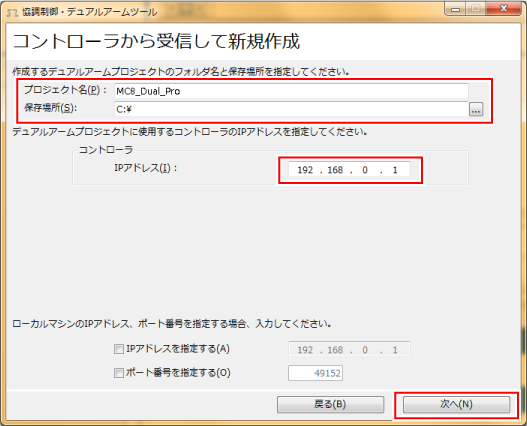
今から作成するデュアルアーム制御用プロジェクト名と保存場所を入力します。
また、データを受信するRC8シリーズまたはMC8シリーズの、IPアドレスを入力します。
それらを入力後、[次へ]をクリックします。
(ローカルマシンのIPアドレス、ポート番号は、必要に応じて入力してください。)
5
下図のようなメッセージが表示されますので[OK]をクリックします。RC8シリーズまたは、MC8シリーズからプロジェクトデータを受信後、デュアルアーム制御用プロジェクトに変換します。
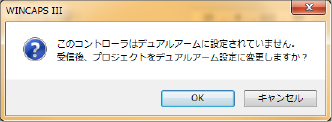
デュアルアーム制御用プロジェクトのフォルダ構成については、"デュアルアーム制御用プロジェクトの概念"を参照してください。
また、どのロボットがRobot0またはRobot1に割当てられるかについては、後述の"ロボット名の割当てルール"を参照してください。
WINCAPSIIIと協調制御·デュアルアームツールを使用する方法
以下の手順で行います。
1
まずWINCAPSIIIにて、RC8シリーズまたはMC8シリーズから、ロボット1台分のプロジェクトデータを受信します。
具体的には、WINCAPSIIIで新規プロジェクトを作成する際、作成方法として"コントローラから情報を取得して新規作成"を選択して作成すると、RC8シリーズまたはMC8シリーズからプロジェクトデータを受信し、そのデータを新規プロジェクトデータとして保存します。
操作方法については、"WINCAPSIIIガイド"の"プロジェクトの新規作成"を参照してください。
ここで受信したプロジェクトデータを、プロジェクト0とします。
2
WINCAPSIIIにて、MC8シリーズのプロジェクトを新規に作成します。
プロジェクトの作成については、"WINCAPSIIIガイド"の"プロジェクトの新規作成"を参照してください。
なお、作成方法は"ロボットタイプを選択して新規作成"とし、ロボットタイプの選択では、"misc"を選択してください。
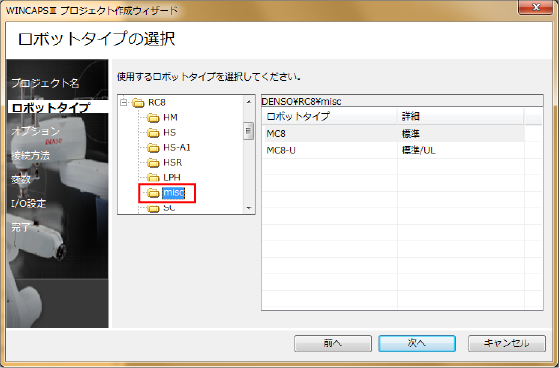
ここで作成したプロジェクトデータを、プロジェクト1とします。
3
協調制御·デュアルアームツールを起動します。
操作経路:PC[スタート]ボタン - [すべてのプログラム] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [協調制御·デュアルアーム] |
4
"デュアルアームプロジェクトを使用する”を選択します。
5
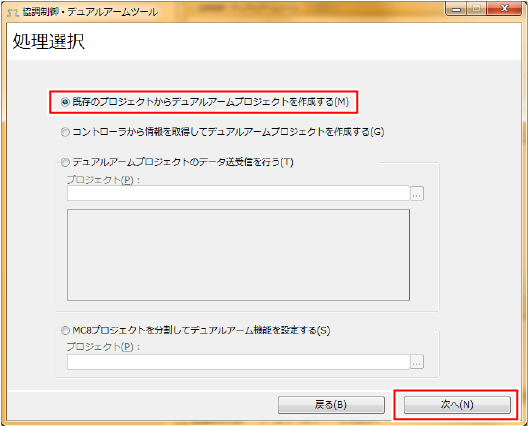
"既存のプロジェクトからデュアルアームプロジェクトを作成する"を選択して、[次へ]をクリックします。
6
今から作成するデュアルアーム用のフォルダ名と保存場所を入力します。
また、先ほど作成したプロジェクトデータのプロジェクトファイル(拡張子 : wpj)を、ロボット0またはロボット1のプロジェクトとして入力します。このとき、かならず下記の組合わせで、プロジェクトファイル(拡張子 : wpj)を入力してください。下記組合わせ以外だと、正しく動作しません。
|
ロボット0には、プロジェクト0のプロジェクトファイルを入力 |
|
ロボット1には、プロジェクト1のプロジェクトファイルを入力 |
なお、プロジェクトファイルは、その格納場所を絶対パスで入力してください。
ロボット0に指定したプロジェクトのプロジェクト名が、新たに作成されるデュアルアーム用プロジェクトのプロジェクト名になります。
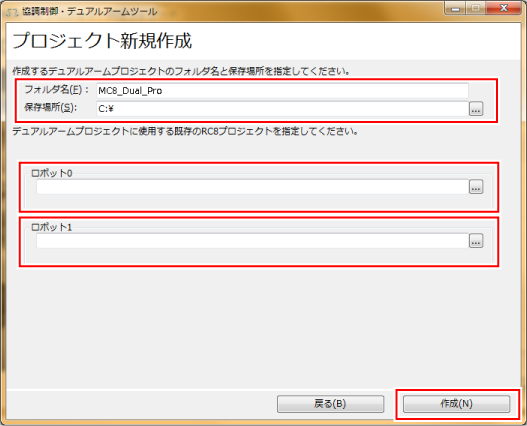
[作成]をクリックすると、デュアルアーム制御用プロジェクトが作成されます。
デュアルアーム制御用プロジェクトのフォルダ構成については、"デュアルアーム制御用プロジェクトの概念"を参照してください。
また、どのロボットがRobot0またはRobot1に割当てられるかについては、後述の"ロボット名の割当てルール"を参照してください。
ロボット名の割当てルール
各ロボットに割当てられるロボット名は、下表のように決まります。
| 組合わせ | ロボット名 | |
|---|---|---|
| Robot0 | Robot1 | |
| RC8シリーズ用ロボット + MC8シリーズ制御ロボット |
RC8シリーズ用ロボット | MC8シリーズ制御ロボット |
| MC8シリーズ制御ロボット × 2 (内部軸と外部軸の混成) |
内部軸のロボット | 外部軸のロボット名 |
| MC8シリーズ制御ロボット × 2 (外部軸のみ) |
接続順が、EtherCATマスターボードに近い軸から、Robot0に割付けられる。 | |
4. ロボット制御用のプロジェクトデータを変換
作成したMC8シリーズのプロジェクトデータは、まだ、各軸を1軸ずつ単独で制御するデータになっています。
各軸をロボットとして制御するためには、プロジェクトデータをロボット制御用に変換する必要があります。
変換が不要な場合は、次の"プロジェクトデータの送信"にお進みください。
ロボット制御用のプロジェクトデータへ変換するには、キネマティクス設定ツールを使用します。キネマティクス設定ツールは、WINCAPSIIIをインストールするときに、同時にインストールされるソフトウェアです(詳細については、"MC8シリーズ(モーションコントローラ)取扱説明書"の"キネマティクス設定"を参照してください)。
以下、ロボット制御用のプロジェクトデータへ変換する手順です。
1
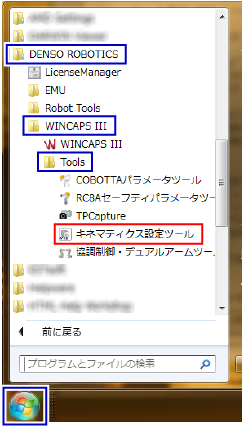
キネマティクス設定ツールを起動します。
操作経路:PC[スタート]ボタン - [すべてのプログラム] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [キネマティクス設定ツール] |
2
"既存のプロジェクトを編集する"を選択し、ロボット制御用に変換したいMC8シリーズのプロジェクトデータのプロジェクトファイル(拡張子 : wpj)を、"プロジェクト"欄に入力します。プロジェクトファイルは、その格納場所を絶対パスで入力してください。
なお、プロジェクトデータのフォルダ構造については、"デュアルアーム制御用プロジェクトの概念"を参照してください。
また、Rotot0とRobot1の両方をロボット制御用に変換する場合は、1つずつ変換してください。
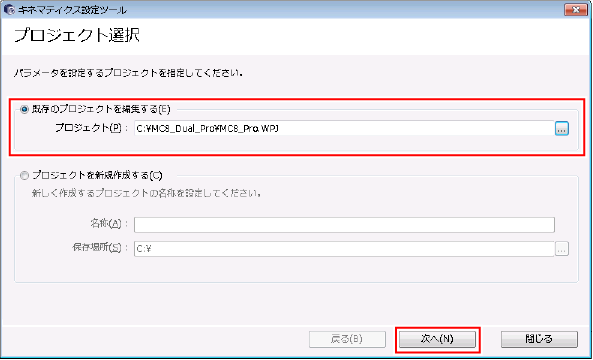
[次へ]をクリックすると、ロボット形状の選択ウィンドウやアーム長の設定ウィンドウが順に表示されますので、ウィンドウの内容に従って、設定してください。
3
最後に、”完了”ウィンドウが表示されるので、そのウィンドウを閉じて終了です。
5. プロジェクトデータの送信
プロジェクトデータを送信します。送信方法は、"プロジェクトデータの送受信"を参照してください。
MC8シリーズ制御ロボットを実際に動作させるためには、各種パラメータの設定が必要です。下記の参照先を参考にして設定してください。
| 内部軸の設定 |
"付加軸取扱説明書"の"付加軸立上げ手順(ボールねじ)" (内部軸の設定の考え方は付加軸を扱う時と同じです。) |
|---|---|
| 外部軸の設定 |
"外部付加軸(EtherCAT)取扱説明書"の"パラメータの設定" |
ID : 3331