
ID : 2846
キネマティクス設定
キネマティクス設定とは、ユーザが用意したロボットをMC8シリーズで動作させることが可能になる機能です。
MC8シリーズの通常の使い方では直動のロボットしか制御できませんが、本機能を用いることでスカラロボットやパラレルリンクロボットといった「アームのあるロボット」を手先位置で制御できるようになります。
この機能はMC8シリーズでだけ使用可能です。(Ver.2.2.*以降)
ロボットタイプX、XY、XYZ、XYZTのキネマティクスは、MC8シリーズの標準機能として搭載されています。そのため、ライセンスが無い状態でも利用可能です。ライセンスの有無で挙動に差は発生しません。
本機能はあくまでユーザが用意したロボットを手先位置で制御できる機能であり、デンソーロボットと同じ性能で動作できる機能ではありません。繰り返し位置決め精度などの諸性能はユーザが用意したロボット構造に依存します。
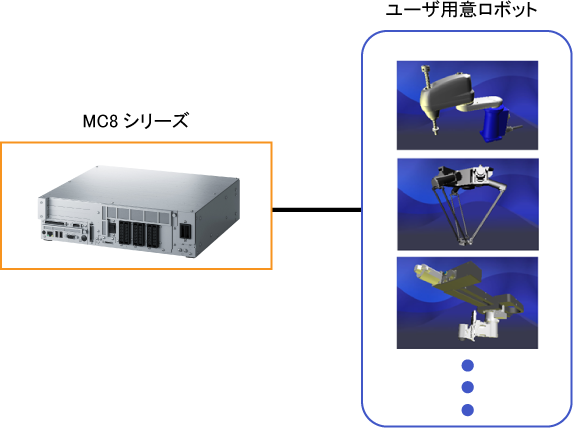
システム構成
本機能にはMC8シリーズの他にロボットが必要となります。ロボットはユーザが用意します。
MC8シリーズのシステム構成についてはMC8シリーズ(モーションコントローラ)取扱説明書の「システム構成」を参照してください。
ID : 2846