
ID : 3349
プロジェクトデータの送受信
RC8シリーズロボットコントローラ(以降 RC8シリーズ)またはMC8シリーズモーションコントローラ(以降 MC8シリーズ)との、プロジェクトデータの送受信を行うツールは、下記の2種類です。
協調制御·デュアルアームツールは、WINCAPSIIIをインストールするときに、同時にインストールされるソフトウェアです。
以下、各ツールの操作方法を説明します。
協調制御·デュアルアームツールによる送受信の方法
協調制御·デュアルアームツールでは、Robot0とRobot1のデータをまとめて送受信します。
以下の手順で行います。
1
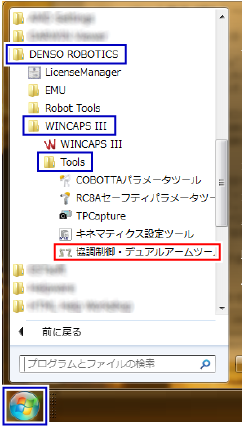
協調制御·デュアルアームツールを起動します。
操作経路:PC[スタート]ボタン - [すべてのプログラム] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [協調制御·デュアルアーム] |
2
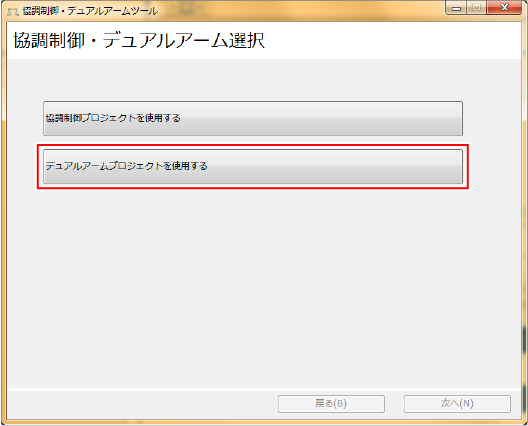
"デュアルアームプロジェクトを使用する”を選択します。
3
"デュアルアームプロジェクトのデータ送受信を行う"を選択し、"プロジェクト"欄に、送受信するデュアルアーム制御用プロジェクトのプロジェクトファイルを入力します。プロジェクトファイルは、その格納場所を絶対パスで入力してください。
また、プロジェクトファイルはRobot0のものを入力してください (プロジェクトデータのフォルダ構造については、"デュアルアーム制御用プロジェクトの概念"を参照してください)。Robot1のプロジェクトファイルを入力すると、送受信できません。
なお、送信先または受信元の、RC8シリーズまたはMC8シリーズのIPアドレスは、入力したプロジェクトファイルのプロジェクトの中で設定されているIPアドレスを使用します。協調制御·デュアルアームツールではIPアドレスを指定しませんので、事前に、IPアドレスを確認しておいてください。IPアドレスの確認方法は、下記参照先をご覧ください。
- プロジェクトのIPアドレス : "WINCAPSIIIガイド"の"通信設定"
- RC8シリーズまたはMC8シリーズのIPアドレス : "ティーチングペンダント操作ガイド"の"通信設定画面の表示·変更"
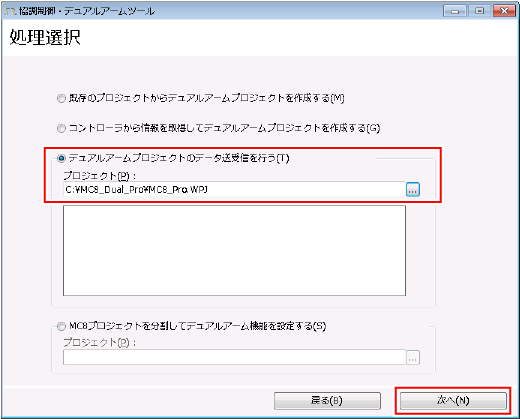
プロジェクトファイルを入力後、[次へ]をクリックします。
4
"送信"か"受信"を選択し[次へ]をクリックすると、選択した処理が実行されます。
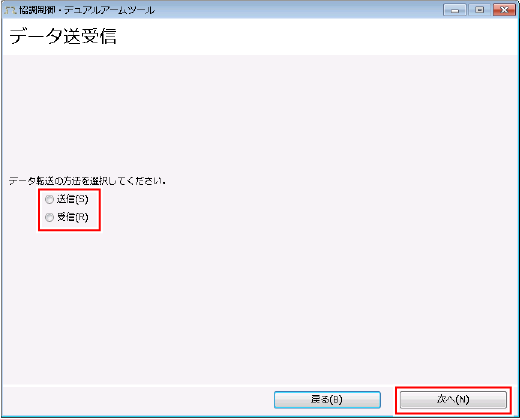
これで、送受信は終了です。
WINCAPSIIIによる送受信の方法
基本的に、操作手順は通常のプロジェクトデータを送受信するときと同じです。
デュアルアーム制御用プロジェクト固有の内容について、2つの項目に分けて説明します。
編集中のデュアルアーム制御用プロジェクトデータを送受信する場合
WINCAPSIIIの[通信]メニューから[データ送受信]を選択し、[データ送受信]ウィンドウを表示させて、送受信します。
ただし、送受信できるデータは、開いているプロジェクトデータによって異なります (プロジェクトデータのフォルダ構造については、"デュアルアーム制御用プロジェクトの概念"を参照してください)。
- Robot0のプロジェクトデータを開いている場合
-
Robot0とRobot1のデータを送受信できます。ただし、Robot1に関しては、送受信するデータの選択はできず、必ずすべてのデータを送受信します。
- Robot1のプロジェクトデータを開いている場合
-
Robot1のみのデータを送受信できます。
新規にデュアルアーム制御用プロジェクトデータを受信する場合
ここでの説明は、RC8シリーズまたはMC8シリーズに、既にデュアルアーム制御用プロジェクトデータが入っている状況において、新規にプロジェクトデータを受信する場合についてです。
この場合は、新規プロジェクトを作成する際、作成方法として"コントローラから情報を取得して新規作成"を選択して作成することで、Robot0とRobot1のデータ(デュアルアーム制御用プロジェクトデータ)を受信できます。
操作方法については、"WINCAPSIIIガイド"の"プロジェクトの新規作成"を参照してください。
ID : 3349