
ID : 3334
デュアルアーム制御用プロジェクトの概念
デュアルアーム制御機能では、RC8シリーズロボットコントローラ(以降 RC8シリーズ)またはMC8シリーズモーションコントローラ(以降 MC8シリーズ)は、2つ分のプロジェクトデータを管理しています。
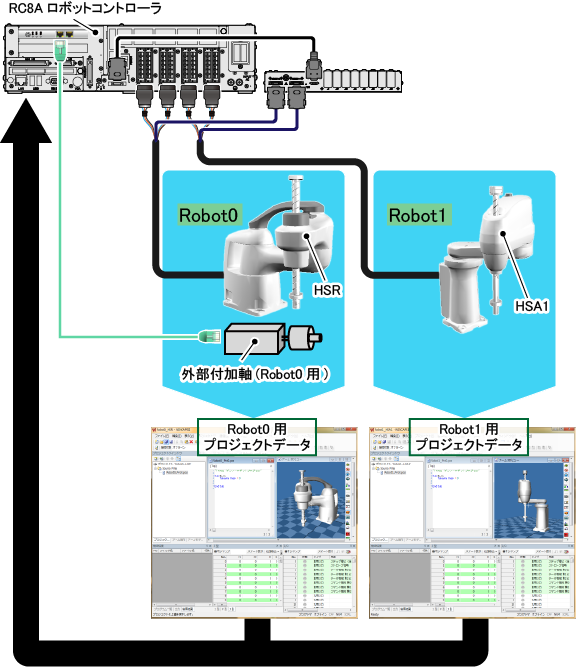
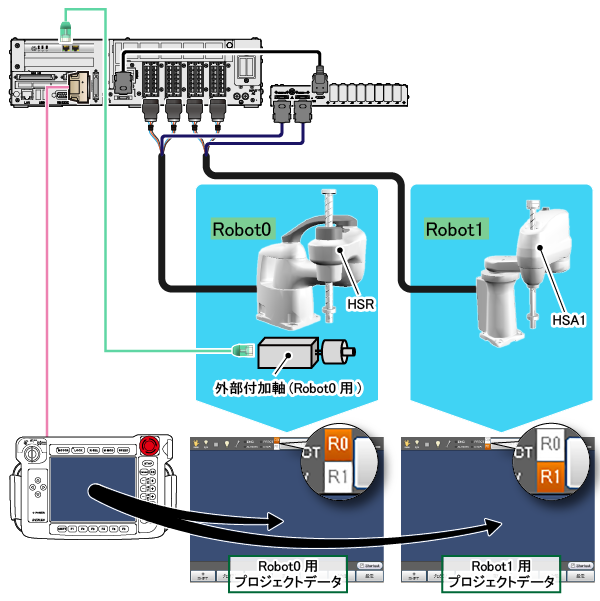
下図は、HSRとHSA1および、外部付加軸を制御する場合の例です。
2つのプロジェクトデータを管理する方法について、下記2つの項目に分けて説明します。
WINCAPSIIIでの管理
2つのプロジェクトデータは、WINCAPSIIIでは、下図のようなフォルダ構成で管理されます。
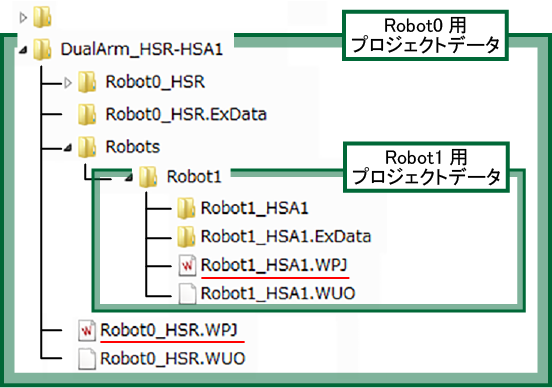
Robot0用のプロジェクトデータの中の"Robots"フォルダの中に、Robot1のプロジェクトが格納されます。
WINCAPSIIIでRobot0のプロジェクトデータを編集する場合は、上図の場合、"Robot0_HSR.WPJ"(プロジェクトファイル)を開くことで行えます。Robot1の場合は、"Robot1_HSA1.WPJ"を開きます。
冒頭のシステム構成図では、外部付加軸がRobot0用に接続されています。外部付加軸の設定をする場合は、Robot0のプロジェクトを開き、あとは、デュアルアーム制御機能を使用しないとき(ロボット1台を、1台のRC8シリーズまたはMC8シリーズで制御するとき)と同じ操作で行います("外部付加軸(EtherCAT)取扱説明書"の"パラメータの設定"を参照)。
システム構成として、MC8シリーズを使用したり、内部付加軸を使用したりする場合も、各種設定は、各ロボットのプロジェクトデータを開き、デュアルアーム制御機能を使用しないときと同じ操作で行います。
設定後のデータを、RC8シリーズまたはMC8シリーズへ送信するには、デュアルアーム制御機能特有の操作が必要です。"プロジェクトデータの送受信"を参照してください。
なお、外部軸の各ロボットへの割当てについて、詳細な考え方を"外部軸の各ロボットへの割当て"に記載しています。外部軸を使用する場合そちらも参照してください。
ティーチングペンダントでの管理
ティーチングペンダントでは、2つのプロジェクトを"ロボット選択"によって切り替えます。
以下の手順で切り替えます。
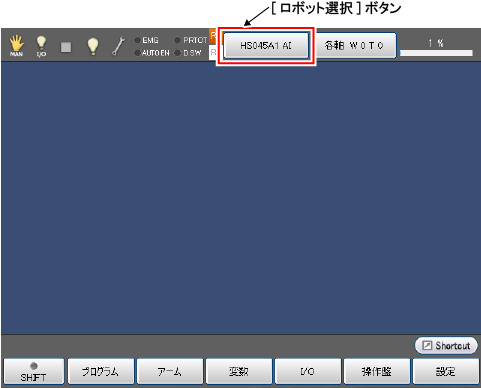
1
[ロボット選択]ボタンを押します。
2
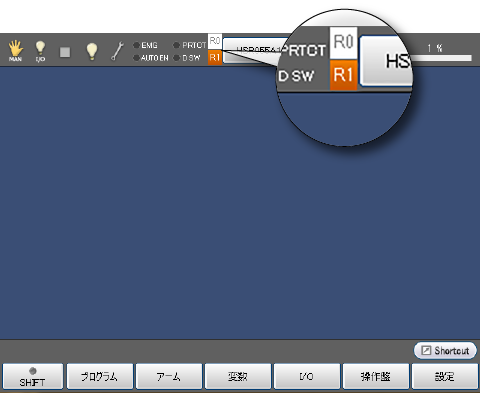
ロボット選択リストから、プロジェクトデータを編集したいロボットを選択します。
なお、ロボット選択リストのR0とR1の意味は下記の通りです。
| R0 : Robot0 |
| R1 : Robot1 |

ここでは、Robot1のプロジェクトデータを編集する場合を考えます。その場合、R1のロボット選択し、[OK]を押します。
3
[ロボット選択]ボタンの左のアイコンが、"R1"をオレンジ色でハッチングした状態に変更されます。この状態でパラメータの設定をすると、Robot1のプロジェクトデータのパラメータを設定することになります。
なお、オレンジ色でハッチングされた方のロボットを"リーダ"と呼びます。これは協調機能を使用する場合と同じ考え方です。ただし、呼び方のみ同じで、機能(リーダとフォロワが協調して動作するなど)は協調機能を使用しない限り、同じにはなりません。
以上で、ロボットの選択操作は終了です。
このように、"ロボットの選択"でどちらかのロボットを"リーダ"にすることで、編集対象のプロジェクトデータを切替えます。
また、"リーダ"にしたロボットが操作対象のロボットとなります。例えば、Robot0(R0)を"リーダ"にした場合、手動動作や変数移動は、Robot0に対して行われます。
ID : 3334
- このページに関連する情報
- 外部軸の各ロボットへの割当て