
ID : 3350
外部軸の各ロボットへの割当て
Robot0とRobot1のどちらに対する外部軸になるのかは、EtherCAT Slave 対応アンプの接続順に関係しています。
EtherCAT マスターボードに最初に接続されたEtherCAT Slave 対応アンプから順に、Robot0用の軸として割当てられ、残りの軸が、Robot1用の軸として割当てられます。
例えば、下図のようなシステム構成を考えます。
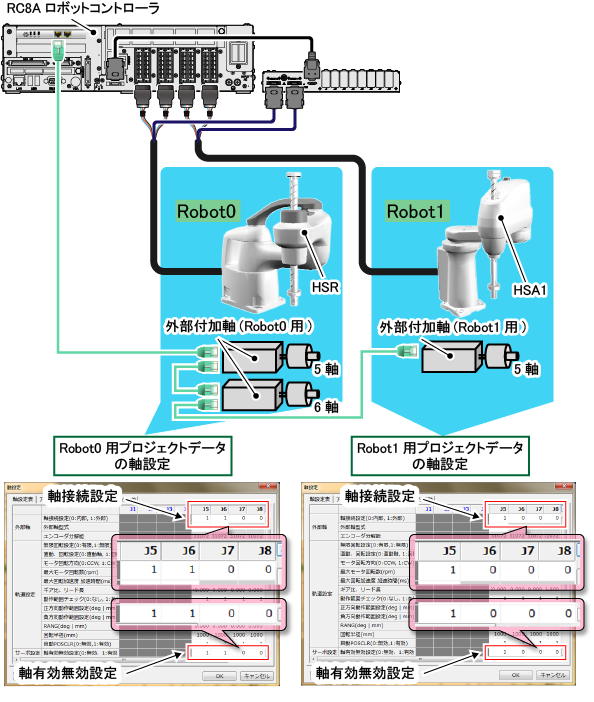
上図の場合、Robot0用プロジェクトデータの軸設定は、5軸と6軸の2つの軸を外部付加軸として使用する設定になっています。したがって、EtherCAT マスターボードから順に数えた2つの軸が、Robot0用の外部軸として割り当てられ、残りの軸がRobot1用軸として割り当てられます。
次に、間違った例を下図に示します。
下図において、本来は、Robot0の外部付加軸は8軸まで使用したかったとします。
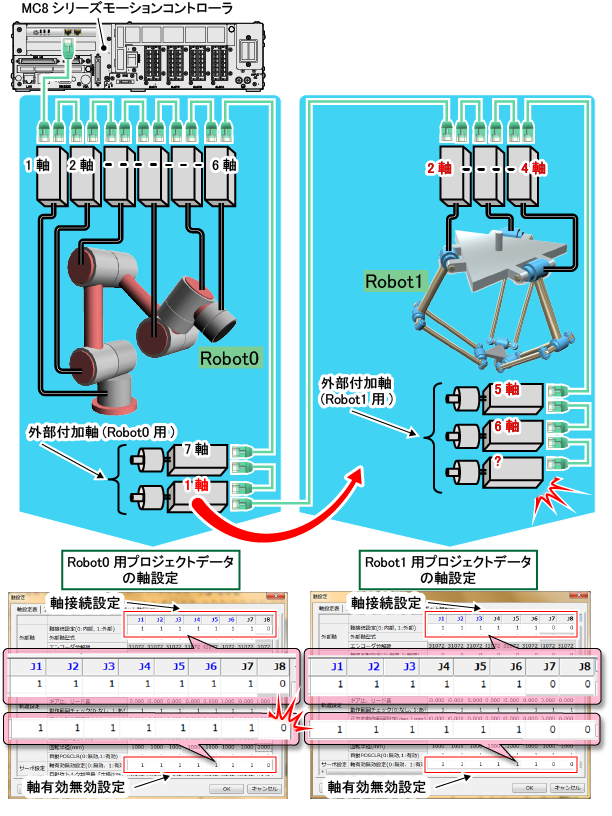
しかし、Robot0用プロジェクトデータの軸設定で、7軸までしか使用しない設定にしてしまったとします。その場合、本来Robot0の8軸としたかった軸が、Robot1の1軸として割当てられてしまい、希望通りの動作をさせることができなくなってしまいます。
また、Robot1用プロジェクトデータの軸設定で、6軸までしか使用しない設定にすると、プロジェクトデータの軸の数と、実際に接続している軸の数が一致しなくなり、エラーとなってしまいます。
軸設定の方法は、"外部付加軸(EtherCAT)取扱説明書"の"パラメータの設定"を参照してください。
ID : 3350