
ID : 3335
デュアルアーム制御機能特有の内容
ここでは、デュアルアーム制御機能特有の内容について、下記項目に分けて説明します。
| PacScriptコマンド | ロボット動作コマンド使用時のロボットの指定 |
|---|---|
| "MC8シリーズ制御ロボット × 2 内部軸のみ"の組合わせでの軸番号 | |
| ティーチングペンダントによる操作/設定 | エラー表示とエラーログ画面 |
| 簡単設定の表示 | |
| 付加軸の操作方法 | |
| 排他機能/協調機能の設定 | |
| ロボット無効設定 | |
| デュアルアーム制御機能無効設定 | |
| EMU | Robot0とRobot1の3Dビュー表示 |
EMUは、複数台のデンソーロボットをシュミレーションすることができる、オプションのソフトウェア(有償)です。
PacScriptのコマンド
-
ロボット動作コマンド使用時のロボットの指定
-
ロボット動作コマンド使用時は、Robot0とRobot1のどちらに対するコマンドかを指定する必要があります。
指定の仕方は、ロボット名をロボット動作コマンドの前に付けます。
例えば、Robot0に対して、Moveコマンドを実行したい場合、下記のように記述します。
Robot0.Move P, @[0] P[0]この考え方は、協調機能を使用する場合も同じです。Moveコマンド以外の、ロボットを指定するコマンドについては、"協調機能ガイド"の"コマンド"内にある"ロボットを指定して使用するコマンド"を参照してください。
また、全ロボットに対して実行されるコマンドもあります。"協調機能ガイド"の"コマンド"内にある"全ロボットを対象にするコマンド"を参照してください。ただし、SysStateコマンドについては、参照先の内容とは異なり、単独ロボット使用時と同じ仕様となります。
"MC8シリーズ制御ロボット × 2 内部軸のみ"の組合わせでの軸番号
-
この組合せでは、Robot1の軸番号は、MC8シリーズモーションコントローラ(以降 MC8シリーズ)に実際に接続しているモータコネクタの軸番号と異なることになります。例えば下図のような構成を考えます。
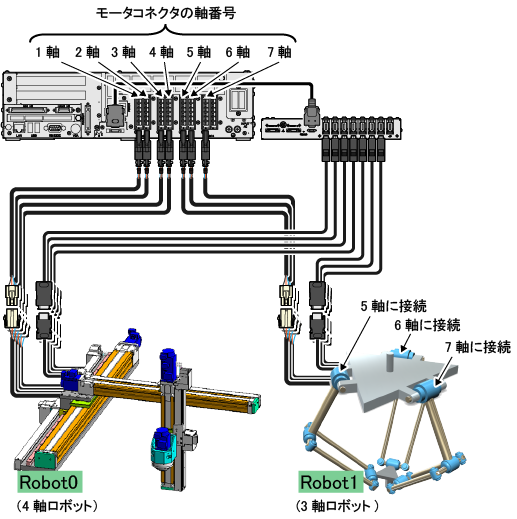
上図では、Robot1の各モータは、MC8シリーズのモータコネクタの、5軸、6軸、7軸に接続されています。しかし、Robot1のプロジェクトデータの中では、モータコネクタの軸番号の若い軸("5軸")から順に、1軸、2軸、3軸として扱われます。
また、プログラムの中でも同じように扱われます。例えば、モータコネクタの5軸に接続されているモータをDriveコマンドで動作させる場合、下記のように1軸を指定して記述します。
Robot1.Drive (1, 43)エラーが発生した場合も同じです。モータコネクタの5軸に接続されているモータにエラーが発生した場合、エラー番号およびエラーメッセージは、1軸に対するものになります。
なお、エラー表示とエラーログ画面に関しては、エラーの対象となるロボットがわかるような表示になります。これは、協調機能使用時と同じです。詳細は"協調機能ガイド"の"エラー表示とエラーログ画面"を参照してください。
モータコネクタの軸番号は、モータ容量によって順番が変わります。"付加軸取扱説明書"の"配線上の注意"を参照してください。
ティーチングペンダントによる操作/設定
エラー表示とエラーログ画面
-
エラー表示とエラーログ画面に関しては、エラーの対象となるロボットがわかるような表示になります。これは、協調機能使用時と同じです。詳細は"協調機能ガイド"の"エラー表示とエラーログ画面"を参照してください。
簡単設定の表示
-
RC8シリーズロボットコントローラを起動時に表示される簡単設定ウィンドウは、Robot0に対するウィンドウのみ表示されます。Robot1に対する簡単設定ウィンドウは表示されません。ただし、Robot1をリーダに指定し、下記操作経路で表示される簡単設定ウィンドウで、Robot1の簡単設定は可能です。
操作経路 : [F2 アーム] - [F6 補助機能] - [F1 使用条件] - [F6 簡単設定] リーダの指定方法に関しては"デュアルアーム制御用プロジェクトの概念"の"ティーチングペンダントでの管理"を参照してください。
また、簡単設定は、設定可能なロボットが限られています。詳細は、"操作ガイド"の"簡単設定(ティーチングペンダント)"を参照してください。
付加軸の操作方法
-
ティーチングペンダントで付加軸を操作する場合、通常、[ロボット選択]ボタンを押して、動作させる対象を付加軸に切替えます。 デュアルアーム制御機能を使用している場合も同じですが、[ロボット選択]ボタンを押して表示されるウィンドウが、通常のものと異なります。
下図のようなウィンドウが表示されます。
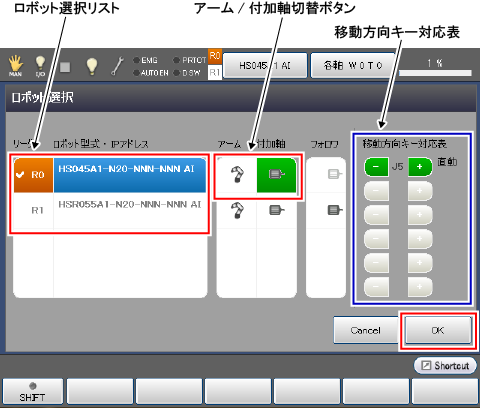
まず、操作したい付加軸が、どのロボットに対する付加軸であるかを指定します。指定するには、"ロボット選択リスト"から、対象のロボットを選択します。
次に、"アーム/付加軸切替ボタン"の中から、付加軸(モータのアイコン)を選択します。"移動方向キー対応表"に付加軸の軸番号と、その付加軸に対応するボタンが緑色で表示されます。
最後に[OK]ボタンを押すことで、操作対象が付加軸に切替わります。
排他機能/協調機能の設定
-
デュアルアーム制御機能での、排他機能および協調機能は、2台のRC8シリーズロボットコントローラ(以降 RC8シリーズ)またはMC8シリーズモーションコントローラ(以降 MC8シリーズ)との間で通信は行いません。1台のRC8シリーズまたはMC8シリーズが、2台のロボットに対し、排他制御または協調制御を行います。したがって、各機能の設定内容が、通常の場合と一部異なります。
排他機能 下記操作経路で表示される設定は通常、排他通信設定ですが、デュアルアーム制御機能では、排他制御の有効/無効を切替えるボタンになります。
したがって、排他通信設定で設定していた、排他制御IP(0)や排他制御コントローラ起動待ち時間などは設定不要となります。
操作経路 : [F2 アーム] - [F6 補助機能] - [F11 排他制御] - [F2 排他通信設定] 上記操作経路の最後のボタンの[F2 排他通信設定]は[F2 排他設定]という名前で表示されます。
初期値は"無効"になっているので、排他機能を使用するときは、必ずこのボタンで、"有効"にしてください。
協調機能 下記操作経路で設定する協調設定(協調コントローラ設定や協調制御通信モードなど)は不要となります。
操作経路 : [F6 設定] - [F9 協調] 上記操作経路の最後のボタンの[F9 協調]は表示されません。
ロボット無効設定
-
片方のロボットに対して、ティーチングやロボットプログラムの調整をしたい場合でも、両方のロボットをRC8シリーズロボットコントローラ(以降 RC8シリーズ)またはMC8シリーズモーションコントローラ(以降 MC8シリーズ)に接続しておかないと、エラーが発生してしまいます。
片方のロボットだけを接続してもエラーが発生しないようにするためには、ロボットの無効設定を行います。
ログインレベルを「メンテナ」にした後、下記操作経路で操作すると、[VRC設定]ウィンドウが表示されます。
操作経路 : [F6 設定] - [F2 システム情報] - [F6 VRC設定] [VRC設定]ウィンドウの下記パラメータの内、接続しないロボットのパラメータを"1"(無効)に設定します。
No. 項目名 79 Robot0 有効/無効設定 80 Robot1 有効/無効設定 設定後、RC8シリーズまたはMC8シリーズを再起動すると、接続していないロボットに対する未接続のエラーが発生しなくなります。
接続していなかったロボットを接続したら、設定を元に戻してください。
デュアルアーム制御機能無効設定
-
Robot0だけを、通常の単独ロボット使用時と同じように使用したい場合、デュアルアーム制御機能無効設定を行います。
下記操作経路の最後のボタン[F1 有効無効設定]は、デュアルアーム制御機能の有効/無効を設定するボタンです。
操作経路 : [F6 設定] - [F10 デュアルアーム] - [F1 有効無効設定] 初期設定は"有効"になっています。"無効"に設定した後、RC8シリーズロボットコントローラまたはMC8シリーズモーションコントローラを再起動すると、Robot0だけを単独で使用する通常の状態になります。この状態では、Robot1が接続されていなくても、未接続のエラーは発生しません。
EMU
Robot0とRobot1の3Dビュー表示
-
EMUのプロジェクトに、デュアルアーム制御用のプロジェクトデータを追加すると、Robot0とRobot1のロボットがそれぞれ3Dビューに表示されます。ただし、追加する際のプロジェクトファイルは、Robot0のプロジェクトファイルを選択してください。Robot1のプロジェクトファイルを選択すると、Robot1のみ3Dビューに表示されます。
EMUのプロジェクトへデュアルアーム制御用のプロジェクトデータを追加する方法は、協調機能のプロジェクトデータをEMUへ追加する方法と同じです。"協調機能ガイド"の"EMUへのロボットの追加"を参照してください。
また、デュアルアーム制御用のプロジェクトデータのフォルダ構成については"デュアルアーム制御用プロジェクトの概念"の"WINCAPSIIIでの管理"を参照してください。
ID : 3335