
ID : 2954
パラメータの設定
外部付加軸を動作させるための設定はWINCAPSIIIのみで可能です。下記の手順で設定を行い、ロボットコントローラへパラメータ送信をします。
型式を付加軸ありに変更
付加軸なしのロボット型式(型式に"I"無し)の場合は付加軸ありのロボット型式に変更してください。
操作経路:[プロジェクト] - [プロパティ]
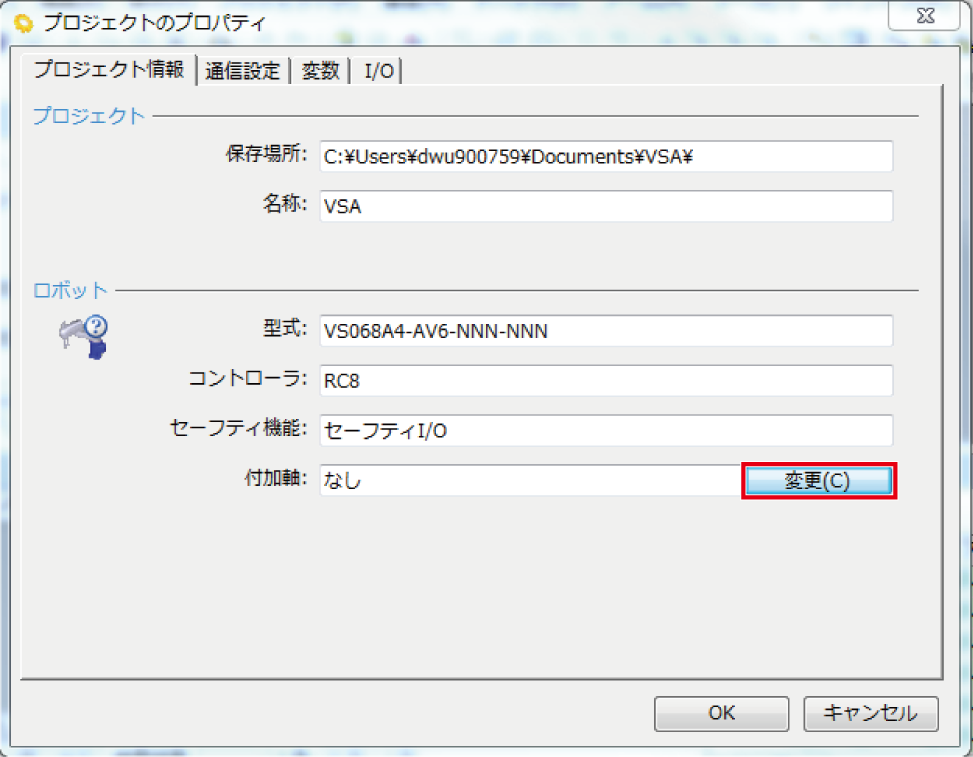
UL対応ロボットコントローラは型式を付加軸ありにするためには、ハードウェア部品の交換が必要となります。弊社営業へお問い合わせください。
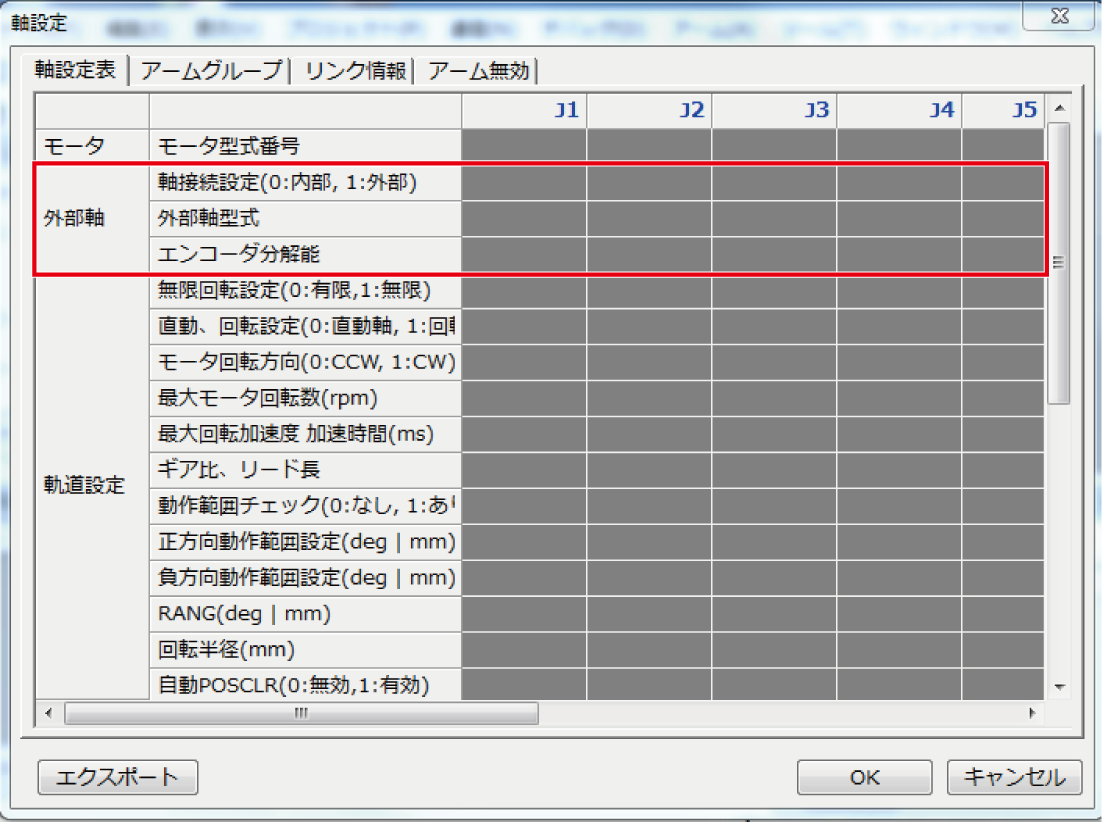
外部付加軸パラメータを設定
軸接続設定、外部軸型式、エンコーダ分解能を設定してください。
操作経路:[プロジェクト] - [軸設定表]
軸接続設定
0:内部
1:外部
外部付加軸として動作させたい軸を「1:外部」に設定してください。
Ver.2.2.*では、「1:外部」に設定できる軸の数は最大2軸です。
| 軸接続設定 | 設定範囲 | デフォルト |
|---|---|---|
| 値 | 0~1 | 0 |
モータ型式番号をエンコーダに設定した状態で、軸接続設定を「1:外部」に設定しないでください。
外部軸型式
0:なし
1:山洋電気
2:安川電機
3:デルタ電子(Ver.2.5.*から使用可能)
4:Panasonic(Ver.2.5.*から使用可能)
5:HIWIN(Ver.2.7.*から使用可能)
外部付加軸として動作させたいメーカを設定してください。
Ver.2.2.*では、外部付加軸を複数の軸で使用する場合は同一メーカに揃えて設定してください。
| 外部軸型式 | 設定範囲 | デフォルト |
|---|---|---|
| 値 | 0~5 | 0 |
エンコーダ分解能
エンコーダ分解能を選択してください。リストにない場合は直接入力してください。
リニアモータを選択する場合
エンコーダ分解能、最大モータ回転数、ギア比、リード長を設定してください。
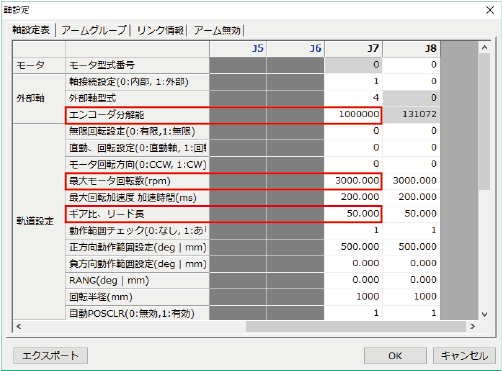
| エンコーダ分解能 | 1000000(固定値) |
|---|---|
| 最大モータ回転数 | 最大速度(単位:mm/min)/リード長(単位:mm) |
| ギア比、リード長 | ピッチ×1000000(単位:mm) |
(例)最高速度0.3m/s、ピッチ0.1mmの場合
エンコーダ分解能:1000000
ギア比、リード長:0.1 × 1000000 = 100000
最大モータ回転数:0.3 × 1000 × 60 / 100000 = 0.18
パラメータをロボットコントローラへ送信
パラメータ設定完了後、ロボットコントローラへパラメータを送信し、ロボットコントローラを再起動してください。
パラメータ設定と実際のハードウェア接続構成が異なる場合はEtherCAT通信が確立せず、エラーが発生します。
(例:パラメータでは外部付加軸が2軸分設定されているが、実際は1軸分しかつながっていない。)
ID : 2954