
ID : 3369
Homing(原点復帰)機能
Homing機能とは指定した原点復帰方法、動作速度等で原点復帰動作を行う機能です。
外部軸のエンコーダがインクリメンタル型である場合、電源を切ることによって絶対位置情報が失われます。そのため開始時の動作をする前にこの機能を使って原点復帰を実行し、位置情報を初期化する必要があります。
Homing機能の実行はコマンドを使用します。また、ティーチングペンダントでも実行することができます。
- 外部軸のエンコーダがアブソリュート型の場合、この機能を使う必要はありません。
- この機能はVer.2.7.*から使用可能です。
事前準備
Homing機能を使用するためには、事前に、外部軸となるサーボアンプにパラメータを設定する必要があります。
原点復帰動作を決定するパラメータは、各アンプメーカが提供する設定ツールを使用し、下記の値を設定してください。
| Index | Sub-Index | Name |
|---|---|---|
| 0x607C | 0x00 | Homing offset |
| 0x6098 | 0x00 | Homing method |
| 0x6099 | - | Homing speeds |
| 0x00 | Number of entries | |
| 0x01 | Speed during search for switch | |
| 0x02 | Speed during search for zero | |
| 0x609A | 0x00 | Homing acceleration |
コマンドを使用した原点復帰
原点復帰はSetHomingコマンドを使用して自動モード、ティーチチェックモードで実行できます。
コマンドの仕様についてはプログラマーズマニュアルの「SetHoming」を参照してください。
コマンドを実行する前に、モータOFFにしてください。モータONの状態の場合エラーが表示されます。
コマンドを実行する前に、TakeArmを行い、制御権を取得してください。
また、ティーチチェックモードで実行するためにはデッドマンSW連動機能の「モータ電源ON連動」をOFFにしておく必要があります。設定手順は「デッドマンSW連動機能の設定」を参照してください。
SetHomingを実行するとモータONになり原点復帰動作が開始し、動作が完了するとモータOFFになります。
- マシンロック中の実行や、原点復帰中のロボット軸の動作は行うことができません。
- ロボット軸、内部付加軸での原点復帰動作はできません。
実施例
下記例はSetHomingを使用した原点復帰の実施例です。
例1:Robot0の7軸の原点復帰を行う。10s経過後原点復帰が終わらなければエラー。
Robot0.SetHoming 7, 10000例2:Robot0の7,8軸の原点復帰を同時に行う。5s経過後原点復帰が終わらなければエラー。
Robot0.SetHoming (7, 8), 5000コマンド実行時の注意事項
以下の場合、原点復帰動作を停止します。
- タイムアウト時間を経過した場合
- サーボアンプ内部でエラーが発生した場合
- ロボットコントローラでエラーが発生した場合
ティーチングペンダントを使用した原点復帰
ユーザーレベル「メンテナ」で操作を行います。
1
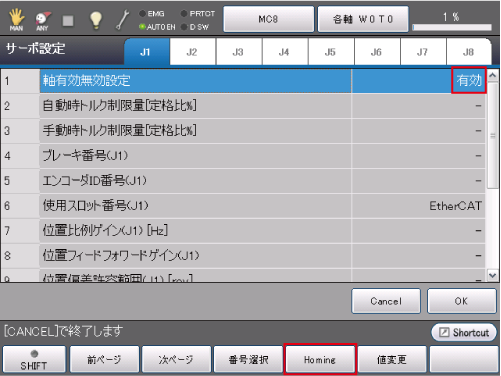
操作経路: [F2 アーム]-[F12 保守]-[F10軸設定] -[F5 サーボ設定]を押します。
サーボ設定画面で軸有効無効設定が有効であることを確認してください。有効でない場合は「付加軸の有効化設定」を参照し、設定をしてください。
ファンクションキーに表示されている [F4 Homing]ボタンを押します。
2
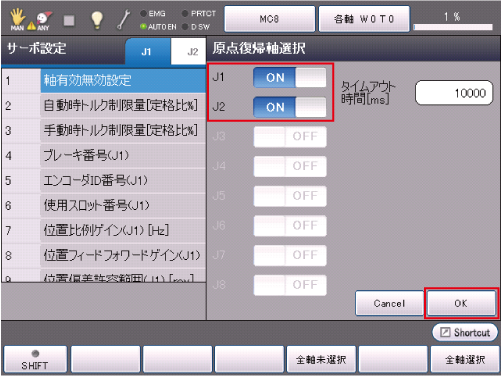
原点復帰軸選択画面で原点復帰を行う軸を選択し、[OK]ボタンを押します。
3
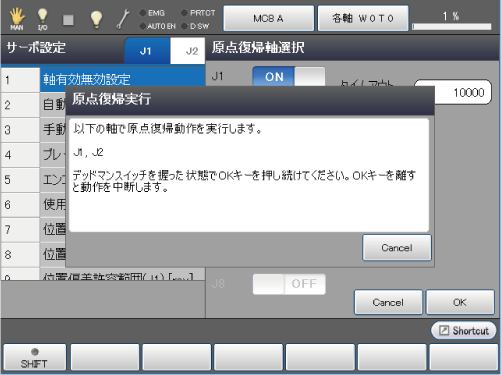
確認用のシステムメッセージが表示されます。
デッドマンスイッチをONにした状態で[OK]キーを押します。押している間、原点復帰動作が実行され、動作中は画面に進歩状況が表示されます。
4
原点復帰が完了するとシステムメッセージが表示されます。
動作中にボタンを離した場合は動作が中断され、エラー画面が表示されます。エラーが発生した場合はStep1から再度操作を行ってください。
ID : 3369