
ID : 4933
付加軸立上げ手順(ボールねじ)
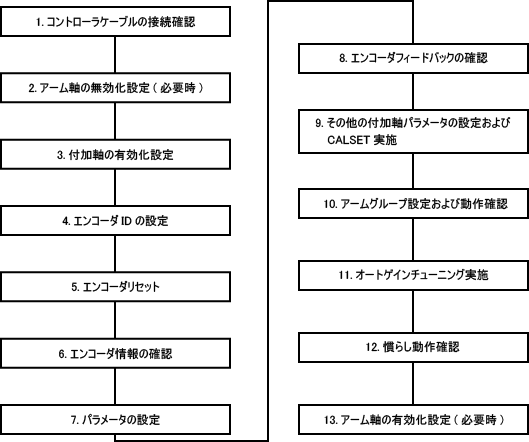
付加軸の立上げに必要な作業を、「ボールねじ」を例に以下に示します。
ティーチングペンダントを使用して一連の作業を行うには、「メンテナ」でログインが必要です。
ユーザレベルの変更方法は、ティーチングペンダント操作ガイドの「ユーザレベル指定によるログイン操作」を参照してください。
各作業概要
(1)コントローラケーブルの接続確認
コントローラに所定のケーブルが接続されていることを確認します。
(2)アーム軸の無効化設定(必要時)
必要時にはアーム軸を無効化します。ロボットを接続せずに付加軸の調整のみ行うようなケースにはアーム無効化は必要です。
(3)付加軸の有効化設定
付加軸を有効に設定します。
(4)エンコーダIDの設定
付加軸モータのIDを正しく設定します。
(5)エンコーダリセット
エンコーダ関連のエラーが発生した場合、エンコーダリセットを実施します。
(6)エンコーダ情報の確認
付加軸のエンコーダが正常状態か確認します。
(7)パラメータの設定
付加軸を手動で動かすために、最低限必要なパラメータを設定します。
(8)エンコーダフィードバックの確認
付加軸のエンコーダから正しい応答があるか確認します。
(9)その他の付加軸パラメータの設定およびCALSET実施
付加軸を動作させるために必要な残りのパラメータの設定および、CALSETを実施します。
(10)アームグループ設定および動作確認
アームグループの設定および、手動各軸モードで動作を確認します。
(11)オートゲインチューニング実施
オートゲインチューニングを実施します。
(12)慣らし動作確認
動作確認用プログラムによる運転を行ない、外部速度を上げながら動作を確認します。
(13)アーム軸の有効化設定(必要時)
アーム軸を無効化していた場合は、有効化します。
ID : 4933