
ID : 4940
エンコーダフィードバックの確認
付加軸のエンコーダから正しい応答があるか確認します。
確認手順
1
[R-SELキー]または、[ロボット選択]ボタンを押します。
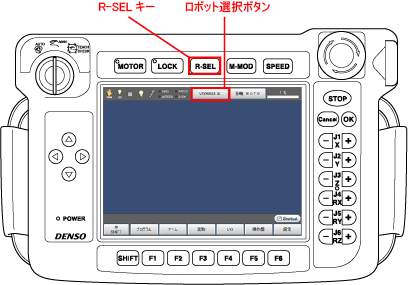
「ロボット選択」画面が表示されます。
2
[付加軸]を選択し、[OK]を押します。
移動方向キーの操作が付加軸に切り替わります。
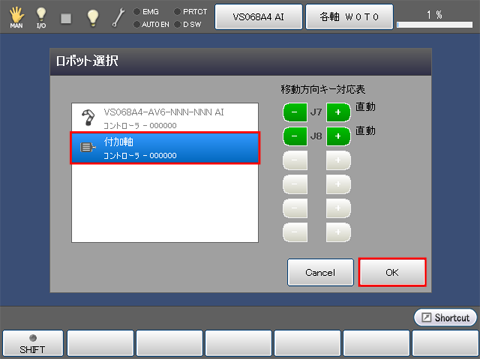
設定が保存され、基本画面に戻ります。
3
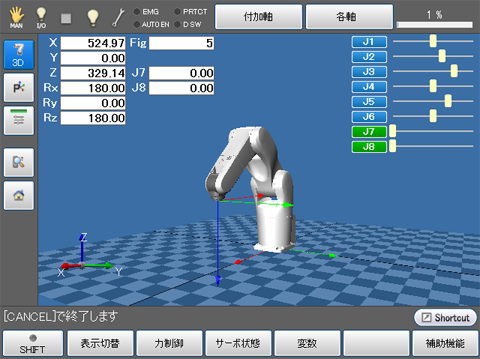
基本画面 - [F2 アーム]を押し、「ロボット現在位置情報」画面を表示します。
4
付加軸を手で押して動かし、エンコーダが追従しているか確認します。
付加軸を手で押すと、「ロボット現在位置情報」画面のロボット現在位置が変化します。
付加軸がブレーキ付きの場合は、以下の操作でブレーキを解除してから確認を行なってください。
- ブレーキの解除方法
- 操作経路:基本画面 - [F2 アーム] - [F12 保守] - [F1 ブレーキ]
-
解除する軸を選択し、[OK]を押します。
必要な場合以外は、再度[OK]を押し、ブレーキロックします。
ブレーキ解除方法については、「配線の確認」を参照ください。
手動操作
- モータをONします。
- ティーチングペンダントの手動操作で±方向に動かし、異常なく動くか確認します。
- この時点では、少し動かせばOKです。
- 操作キーと、付加軸の±動作方向が合っているかを確認しておきます。逆になっている場合は、「その他の付加軸パラメータの設定およびCALSET実施」で、[モータ回転方向]を逆の設定にします。
ID : 4940