
ID : 4931
パラメータの一覧表示(WINCAPSIII)
設定されている各軸パラメータは、WINCAPSIIIを使って一覧表示、およびCSV形式で出力することができます。
またWINCAPSIIIへのログインレベルが[プログラマ]の場合は、「軸設定」画面の各項目を設定することができます。
-
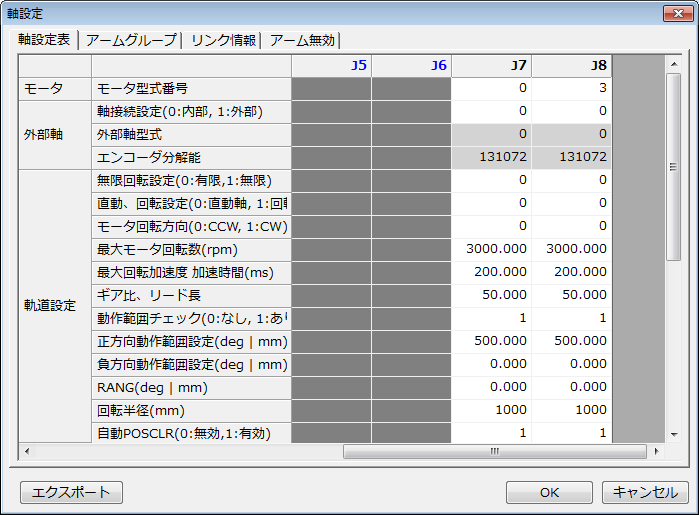
「軸設定表」タブ
- モータ
- 軌道設定
- サーボ設定
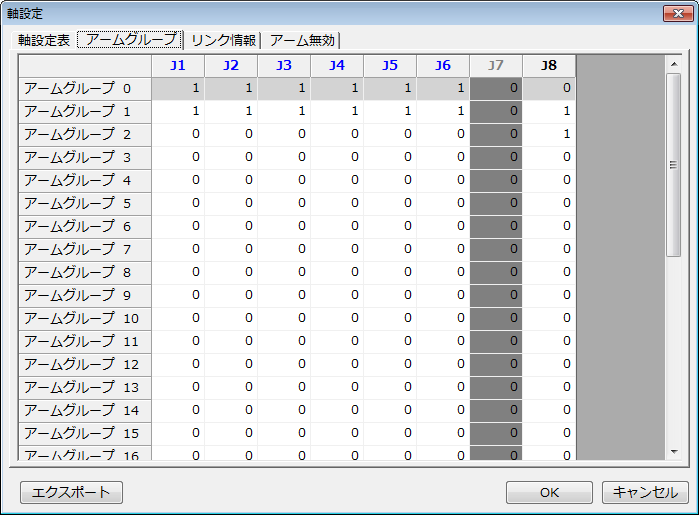
- 「アームグループ」タブ
- 「リンク情報」タブ
- 「アーム無効」タブ
「軸設定」画面の表示
操作経路:[プロジェクト] - [軸設定表]
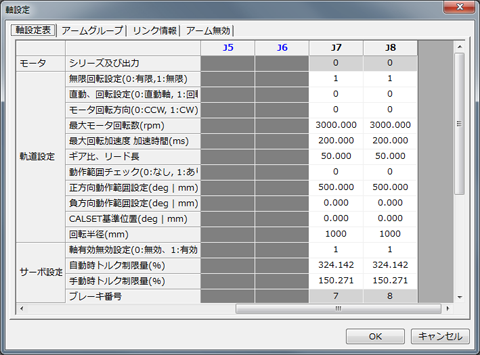
軸設定表
付加軸のモータ型式や動作範囲等の設定値を確認、変更することができます。
各設定項目の内容は「付加軸取扱説明書」を参照してください。
アームグループ
付加軸をプログラムで動作させるためのアームグループを設定します。
設定内容は、付加軸取扱説明書の「付加軸アームグループ登録」を参照してください。
リンク情報
ロボット軸と付加軸をプログラムで動作させるためのアームグループを設定します。
設定内容は、付加軸取扱説明書の「リンク情報設定」を参照してください。

アーム無効
付加軸調整時に付加軸のみモータオンして動作確認する場合、アーム無効に設定します。
設定内容は、付加軸取扱説明書の「アーム軸有効/無効設定方法」を参照してください。
ID : 4931