
ID : 4900
付加軸のアームグループ登録
付加軸をプログラムで動作させるために、アームグループを設定します。
アームグループとは
タスクは、制御権を取得することにより、動作命令を実行させることができます。
制御権をまとめて取得するために、複数の軸をグルーピング化したものを、アームグループといいます。
- アームグループ(例:6軸ロボット)

上の例では、
アームグループ 0 :ロボット軸のみ
アームグループ 1 :付加軸(7軸、8軸)のみ
アームグループ 2 :ロボット軸+付加軸(7軸、8軸)
タスク上でアームグループを取得することにより、付加軸を動作させることができます。
- 上のグループ設定で、アームグループ1を取得したタスクは、付加軸の7軸と8軸のみを動作させることができます。
- 複数のタスクから同時に同じ軸に対して、動作命令が実行されないように制御します。
アームグループ取得方法
TakeArmコマンドの引数に、取得するアームグループの番号を持たせることによって、アームグループを取得します。
以下の例では、"Pro1"はTakeArmコマンドでアームグループ1を取得しています。
アームグループ使用上の注意事項
他のプログラムが制御権を取得しているアームグループ軸と重なりのあるアームグループは、別のプログラムで制御権を取得できません。軸に重なりのないアームグループをもつプログラムは、同時に実行させることができます。
- 例

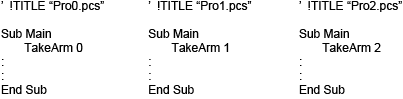
アームグループ0とアームグループ1は軸に重なりがないため、"Pro0"と"Pro1"は同時に実行可能です。(ロボットと付加軸を別のプログラムで同時に動作できます。)
アームグループ0とアームグループ2は軸(J1~J6)に重なりがあるため、"Pro0"と"Pro2"は同時に実行できません。TakeArmコマンド実行時エラーとなります。
アームグループ解放方法
GiveArmコマンドを実行することにより、現在取得しているアームグループの制御権を解放します。
エラーの発生またはプログラムの終了により、プログラムが停止状態になった場合も、自動的に制御権を解放します。
アームグループ設定方法
1
基本画面 - [F2 アーム] - [F12 保守] - [F10 軸設定] - [F1 アームグループ]を押します。

「アームグループ設定」画面が表示されます。
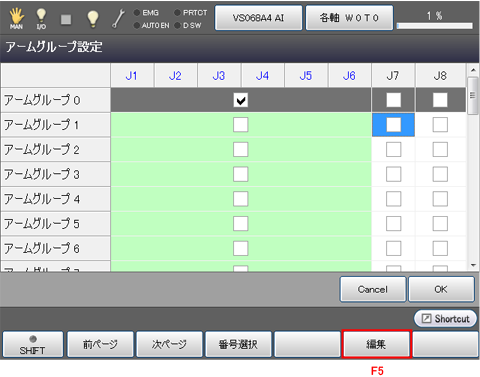
2
設定したいグループの軸にカーソルを合わせ、[F5 編集]を押します。
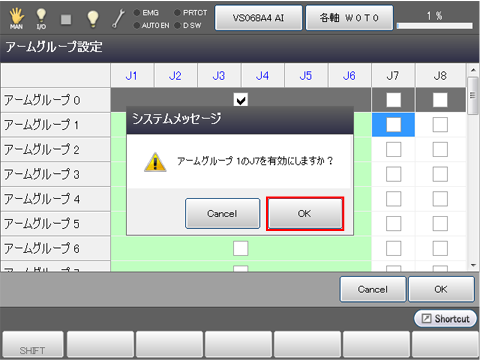
3
有効/無効を確認するためのシステムメッセージが表示されますので、よければ[OK]を押します。
[Cancel]を押すと、設定は反映されません。
4
全てのアームグループの登録が完了後、「アームグループ設定」画面の[OK]を押します。
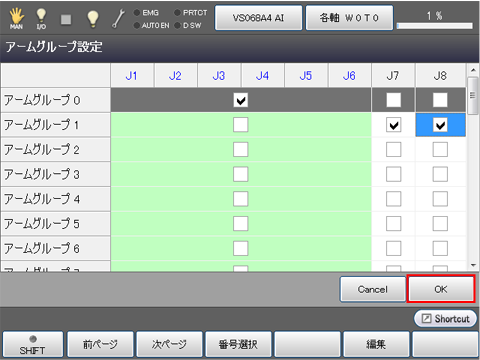
登録したアームグループの設定が保存され、「軸設定」画面に戻ります。
アームグループ設定上の注意事項
- 変更した設定は、コントローラ電源再投入後に有効となります。
- アームグループ0は設定できません。
- ロボットはロボット軸の単位で設定されます。例えば6軸ロボットの場合、1軸から6軸はまとめて[有効]か[無効]に設定されます。
-
アームグループで選択する軸は、「サーボ設定」画面で[軸有効無効設定]が[有効]になっている必要があります。
ID : 4900