
ID : 4902
リンク情報設定
RC8シリーズロボットコントローラは、手動動作またはティーチチェック動作において、駆動しているロボット軸の動作速度を常時監視し、250mm/sec以下に制限します。
付加軸を手動動作またはティーチチェック動作で駆動するときも、同様に動作速度を制限します。
ロボット軸と付加軸のリンク状態を設定することにより、動作している軸の速度の和を常時監視し、250mm/sec以下に制限することができます。ただし、各軸の動作方向は考慮されませんので、実際の合成速度とは異なります。
リンク情報とは
ロボット各軸および付加軸(J7、J8)が動作する際に相互に影響するか、または影響しないかをあらわす各軸間の関係のことです。
リンク情報を[リンクする]と設定した場合、各軸の動作が相互に影響しあう状態になります。[リンクしない]と設定すると、各軸の動作が相互に影響しません。
ロボットの軸は全軸まとめて[リンクする]または[リンクしない]に設定されます。
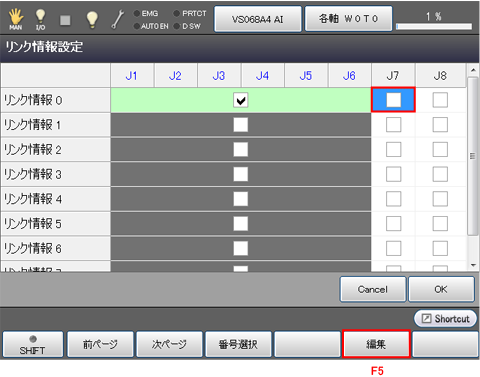
以下にリンク情報の設定画面の例を示します。
リンク情報設定 WINCAPSIII画面(例:6軸ロボット)

[1]は[リンクする]と設定した状態、[0]は[リンクしない]と設定した状態をあらわします。
上記、画面設定例では、
リンク情報1:ロボット軸(J1~J6)と付加軸(J8)はリンクしますので、ロボット軸の動作と付加軸(J8)の動作は相互に影響します。
リンク情報2:付加軸(7軸)は他のどの軸ともリンクしませんので、付加軸(J7)の動作はロボット軸の動作および付加軸(J8)の動作に対して影響しません。
リンク情報の設定例
以下にロボットと付加軸の構成と、その場合のリンク情報の設定のしかたについて、例を示します。
<例1> ロボット軸と付加軸(J7, J8)をリンクする場合
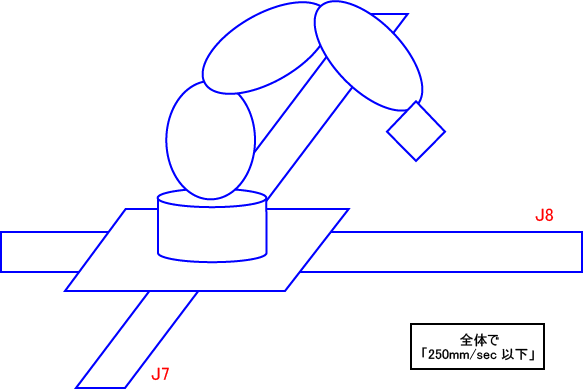
上図のような構成の場合、付加軸(J7、J8)の動作がロボット軸の動作に対して影響するため、ロボット軸と付加軸(J7、J8)は[リンクする]に設定します。
この場合は全体が動作速度の制限の対象になります。
- リンク情報設定例(6軸ロボット)

<例2> ロボット軸と付加軸(J7)をリンクする場合
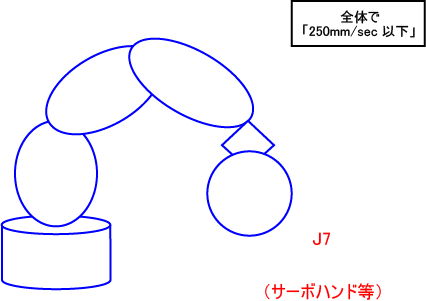
上図のような構成の場合、ロボット軸の動作が付加軸(J7)の動作に対して影響をするため、ロボット軸と付加軸(J7)は[リンクする]に設定します。
この場合は全体が動作速度の制 限の対象になります。
- リンク情報設定例(6軸ロボット)

<例3> ロボット軸と付加軸はリンクしないが、付加軸J7とJ8をリンクする場合
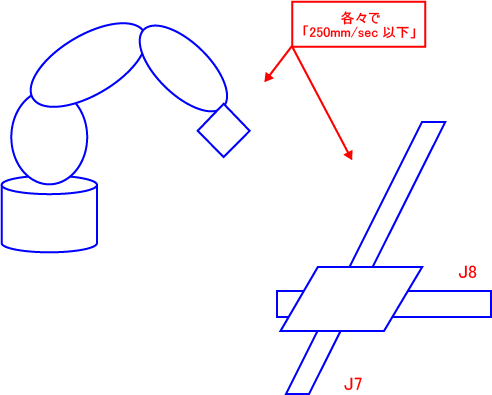
上図のような構成の場合、付加軸(J7、J8)の動作はロボット軸の動作に対して影響をしないため、ロボット軸と付加軸(J7、J8)は[リンクしない]に設定します。しかしJ7とJ8の動作は相互に影響するため、[リンクする]に設定します。
この場合はロボット軸動作、付加軸動作(J7、J8)は別々に動作速度の制限の対象になります。
しかし、J7とJ8は全体で速度制限の対象になります。
- リンク情報設定例(6軸ロボット)

<例4> ロボット軸と付加軸間も、付加軸J7とJ8間もいずれもリンクしない場合

上図のような構成の場合、付加軸(J7、J8)の動作はロボット軸の動作に対して影響をしないため、ロボット軸と付加軸(J7、J8)は[リンクしない]に設定します。また付加軸(J7)と付加軸(J8)についても相互の動作に影響をしないため、付加軸(J7)と付加軸(J8)も[リンクしない]に設定します。
この場合はロボット軸動作、付加軸(J7)および付加軸(J8)動作の各々は別々に動作速度の制限の対象になります。
- リンク情報設定例(6軸ロボット)

リンク情報設定方法
1
基本画面 - [F2 アーム] - [F12 保守] - [F10 軸設定] - [F3 リンク情報]を押します。

「リンク情報設定」画面が表示されます。

2
リンク情報を変更する軸を選択し、[F5 編集]を押します。
3
リンク情報を有効にするかのシステムメッセージが表示されますので、よければ[OK]を押します。
[Cancel]を押すと、設定は変更されません。
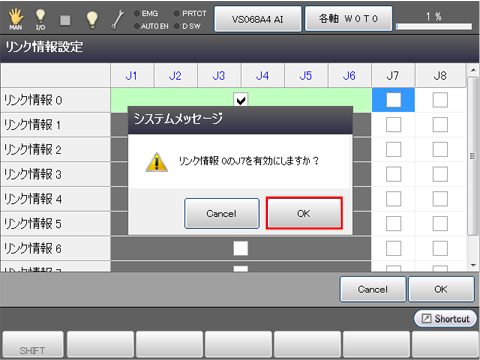
選択した軸にチェックマークが表示されます。
4
全ての設定が完了後、[OK]を押します。

設定が保存され、「軸設定」画面に戻ります。
リンク情報設定上の注意事項
- 変更した設定は、次回電源立ち上げ時に有効となります。
- ロボットはロボット軸の単位で設定されます。例えば4軸ロボットの場合、1軸から4軸はまとめて[有効]か[無効]に設定されます。
-
リンク情報で選択する軸は、[サーボパラメータ設定]で[軸有効無効設定]が[有効]になっている必要があります。
操作経路:[F2 アーム] - [F12 保守] - [F7 軸設定] - [F5 サーボ設定]
詳しい設定方法は、「サーボパラメータの設定」を参照してください。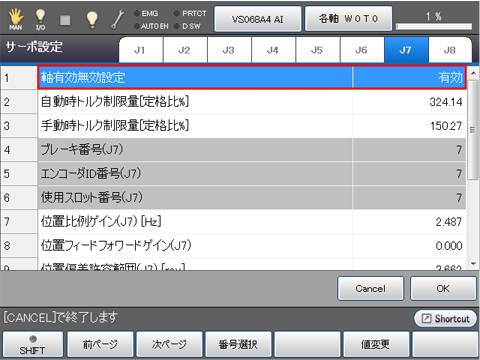
ID : 4902