
ID : 5087
サーボパラメータの設定
付加軸サーボ系のゲインなどを設定します。
以下に、ティーチングペンダントの操作による、設定手順を示します。
サーボパラメータ設定方法
1
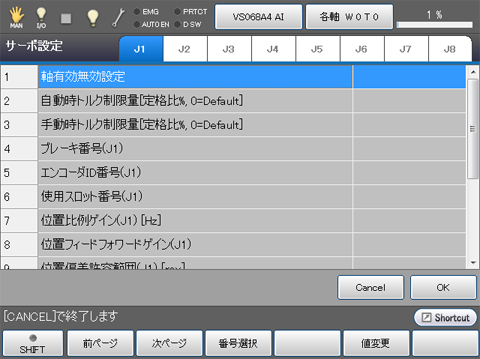
「軸設定」画面 - [F5 サーボ設定]を押して、次のような「サーボ設定」画面を表示します。
2
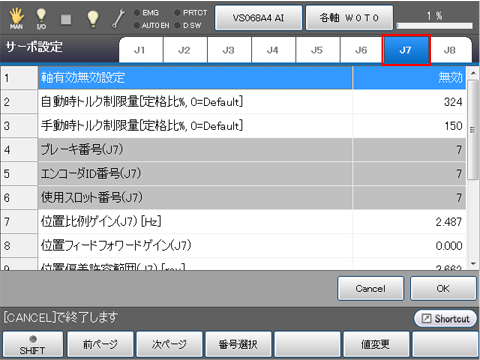
設定を行うタブを選択します。
7軸を選択した場合、以下のように表示されます。
3
サーボパラメータの各設定を変更し、[OK]を押します。
各パラメータ詳細は、以下の「サーボパラメータ一覧」を参照ください。
4
全てのサーボパラメータの設定が完了後、[OK]を押します。
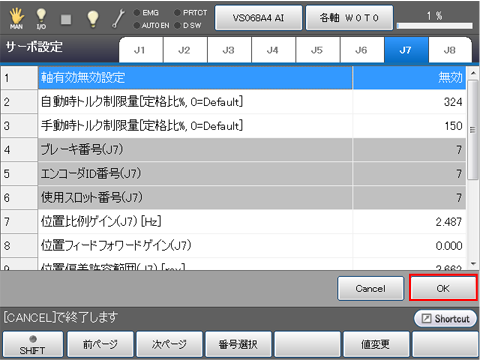
登録したサーボパラメータの設定が保存され、「軸設定」画面に戻ります。
サーボパラメータ一覧
| パラメータの名称 | 設定範囲 | 出荷 設定値 | 単位 | 内容 | 備考 |
|---|---|---|---|---|---|
|
軸有効無効設定 (無効、有効、エンコーダのみ有効) |
無効、有効、エンコーダのみ有効 | 無効 | モータを接続し、駆動する場合は"有効"、エンコーダのみ使用する場合は"エンコーダのみ有効"に設定してください。 | [エンコーダのみ有効]に設定した場合、モータON時にブレーキは解除されます。偏荷重が加わる場合は、偏荷重方向に動作しますので、ご注意ください。 | |
|
自動時トルク制限量 [定格比%, 0=Default] |
0~400 | 324 | % | 自動モード時のトルク制限量を設定してください。 | |
|
手動時トルク制限量 [定格比%, 0=Default] |
0~400 | 150 | % | 手動モード時のトルク制限量を設定してください。 | |
| ブレーキ番号 | *軸番号 | モータブレーキリレー番号表示 | 変更できません | ||
| エンコーダID番号 | *軸番号 | エンコーダID番号表示 | 変更できません | ||
| 使用スロット番号 | *軸番号 | パワーモジュールスロット番号表示 | 変更できません | ||
| 位置比例ゲイン[Hz] | 0~100 | 2.487 | Hz | 位置制御系の応答性を設定します。値を大きくすると、位置決め時間が短くなります。 | |
| 位置フィードフォワードゲイン | 0~2 | 0.000 | 位置制御系の速度フィードフォワード量を設定します。値を大きくすると位置偏差が小さくなり応答性が上がりますが、オーバシュートが生じやすくなります。 | ||
| 位置偏差許容範囲[rev] | -1000~1000 | 3.662 | rev | 位置偏差の許容範囲を設定します。設定範囲を超える位置偏差が生じた場合、エラーとなります。 | 位置偏差許容範囲は、式を満たすように設定してください。 |
| 速度比例ゲイン[Hz] | 0~1000 | 15.803 | Hz | 速度制御系の応答性を設定します。値を大きくすると位置比例 ゲインを大きく設定できるため、応答性が高くできます。 | |
| 速度積分ゲイン[ms] | 0~100 | 10.000 | ms | 速度制御系の積分補償ゲインを設定します。値を大きくすると、停止後の速度偏差が早く収束します。 | |
| トルク指令ローパスフィルタ2時定数2[ms] | 0~327.67 | 0.532 | ms | トルク指令部の一次遅れフィルタの帯域を設定します。小さい値にするほどフィルタのカットオフ周波数が小さくなります。 | |
|
トルクオフセット設定 [定格比%] |
-100~100 | 0 | % | トルク指令値のオフセット値を設定します。モータに偏荷重が加わる(重力方向動作)場合、オフセットにて偏荷重を補償します。 | オートゲインチューニング時、[重力補償有り]に設定すると、トルクオフセット値が自動的に設定されます。 |
| モータ型式番号 | *軸番号 | 変更できません |
パラメータ詳細説明
位置比例ゲイン
位置比例ゲインの値を大きくすると、位置決め時間が短くなります。
ただし、機械系の固有振動数以上にゲインを上げると振動やオーバシュートが生じやすくなります。
目安は機械系の固有振動数の1/2πです。
例えば、固有振動数が20[Hz]の場合、位置比例ゲインは、20/2/π=3.2[Hz]程度に設定ください。
位置フィードフォワードゲイン
位置制御系の速度フィードフォワード量を設定します。値を大きく設定すると位置偏差が小さくなり応答性が上がります。"100"に設定すると一定速度で動作中の位置偏差がほぼ"0"となります。ただし、値を大きく設定すると、振動やオーバシュートが生じやすくなります。
位置偏差許容範囲
位置偏差の許容範囲を設定します。設定範囲を超える位置偏差が生じた場合、エラーとなります。位置偏差許容範囲は、次式を満たすように設定してください。
-
[位置偏差許容範囲(rev)]>[モータ最高速度設定値(rpm)]× (1.0-[位置フォワードゲイン(%)]×0.01)/[位置比例ゲイン(Hz)]/377
※:377 = 60*2*π
速度比例ゲイン
速度制御系の応答性の設定として、希望する応答周波数(Hz)を入力します。値を大きくすると、位置比例ゲインを大きく設定できるため、ロボットの動作速度が速くなります。
システムは、ロボットの負荷・イナーシャが0%のときの応答周波数になるように、様々な内部の設定値を自動で切り替えます。よって、実際の負荷・イナーシャにより、表示の応答周波数通りに動作しない場合があります。
速度積分ゲイン
速度制御系の積分補償ゲインを設定します。
値を大きくすると、積分時定数が小さくなり、停止後の速度偏差が早く収束します。ただし、剛性の低い機械で値を大きくすると、残留振動の収束性が低下します。
トルク指令ローパスフィルタ2時定数2
トルク指令部の一次遅れフィルタの帯域を設定します。
小さい値にするほどフィルタカットのカットオフ周波数が小さくなります。
トルクオフセット設定
トルク指令値のオフセット値を設定します。重力などによりモータに偏荷重が加わる場合、トルクオフセットにて偏荷重を補償します。最大で定格トルク分のオフセットを設定できます。
一度に大きなトルクオフセットを設定すると、モータ電源投入直後に設定方向に付加軸が動作する場合があります。トルクオフセットは「サーボログ」にてトルク指令値と偏差波形を確認の上、徐々に値を変化させてください。
また、オートゲインチューニング時に「重力補償有り」を選択した場合、トルクオフセット値が自動的に設定されます。
ID : 5087
- このページに関連する情報
- サーボログ
- サーボログのグラフ表示方法