
ID : 5095
サーボログ
モータの制御を詳細に記録する機能です。
サーボログ記録条件
記録間隔は1~8msから選択して記録することができます。
記録時間は10s~60sから選択できます。
記録可能なデータは、以下の7種類です。一度に2種類のデータを記録できます。
-
モータ速度指令
モータ回転速度の指令値。単位は(rpm)
-
モータ実速度
モータ回転速度の実測値。単位は(rpm)
-
トルク指令
モータのトルク指令値からトルクオフセットを除いた値。単位は定格トルク比(%)
-
位置偏差
モータ角度指令値とモータ角度実測値との偏差。単位は、直動軸(deg)、回転軸(mm)
-
電流値
モータの電流値。単位は定格電流比(%)
-
指令値
モータの角度指令値。単位は角度(deg)
-
エンコーダ値
モータのエンコーダ値。単位は角度(deg)
サーボログ設定手順
設定手順を説明します。
1
基本画面 - [F2 アーム] - [F3 サーボ状態] - [サーボログ]タブ - [F6 設定]を押します。
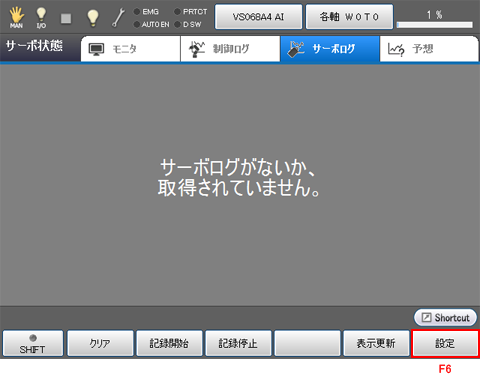
「サーボログ設定」画面が表示されます。
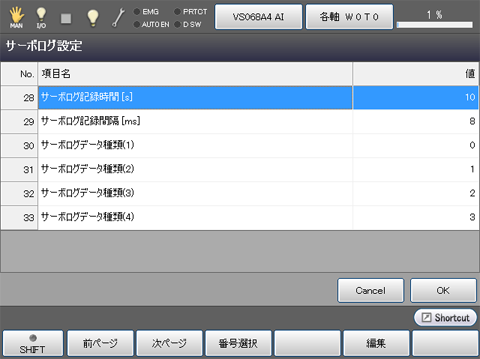
2
サーボログ設定パラメータの各設定を変更し、[OK]を押します。
3
全てのサーボログ設定パラメータの設定が完了後、[OK]を押します。
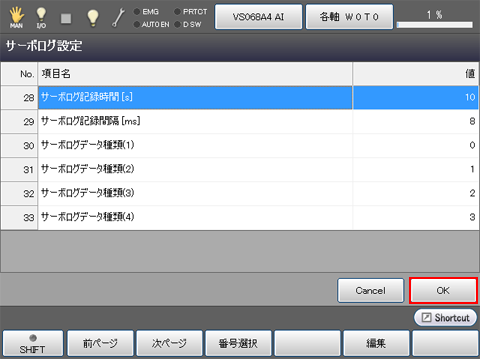
登録したサーボログ設定パラメータの設定が保存され、「サーボ状態」画面に戻ります。
サーボログ記録開始、停止方法
サーボログの記録は、以下の記録方法があります。
- プログラムにてコマンドを使用し、記録する
- ティーチングペンダントを操作し、直接手動で記録する
プログラムを使用したサーボログ記録方法
プログラムにて、サーボログの記録開始「SysLog.Servo.Start」、停止「SysLog.Servo.Stop」、初期化「SysLog.Servo.Clear」を実行し、サーボログ記録のタイミングを設定します。
詳細は、「SysLog.Servo.Start」、「SysLog.Servo.Stop」、「SysLog.Servo.Clear」を参照ください。
記録開始から停止までの間にエラーなどが発生し、モータ電源がOFFした場合は、モータOFF後3.2秒間のデータを記録します。
ティーチングペンダントの操作によるサーボログ記録手順
ティーチンペンダントの操作によって、サーボログを記録する手順を説明します。
1
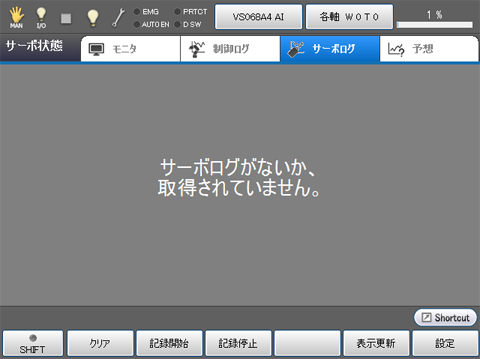
基本画面 - [F2 アーム] - [F3 サーボ状態] - [サーボログ]タブを押します。

「サーボ状態」画面が表示されます。
2
[F2 記録開始]を押します。
サーボログの記録が開始され、[サーボログ]タブに"REC"が表示されます。
「サーボログ設定」画面にて設定した[サーボログ記録時間]が経過すると、記録は自動で停止し"REC"の表示は消えます。
3
[F5 表示更新]を押します。
記録したサーボログが読み込まれます。
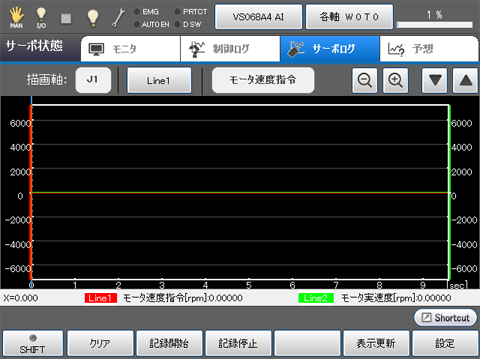
記録したサーボログが表示されます。
ID : 5095