
ID : 4903
回転半径の設定(付加軸を回転軸に設定する場合)
RC8シリーズロボットコントローラでは、ロボット軸および付加軸の動作速度が、手動動作または、ティーチチェック動作において、250mm/secを超えないように制御されます。
付加軸を回転軸に設定した場合は、付加軸の回転半径をパラメータとして設定する必要があります。
回転半径パラメータ設定上の注意事項
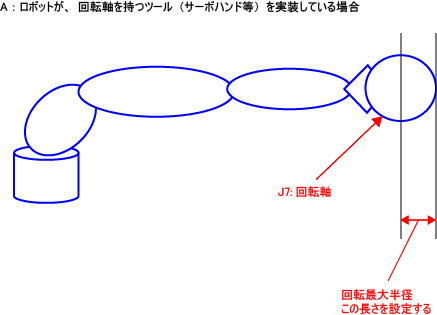
- "A"のようにロボットが回転軸J7を持つツール(サーボハンド等)を実装している場合、その回転軸の回転半径をパラメータとして設定します。
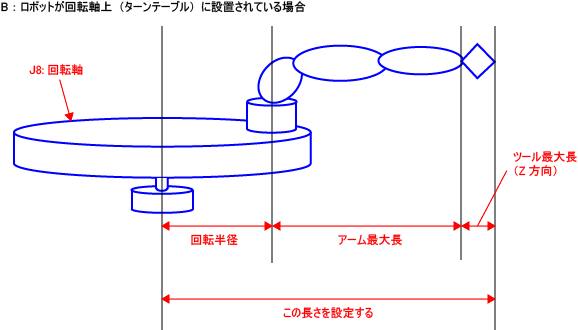
- "B"のようにロボットが回転軸J8上(ターンテーブル等)に設置されている場合、その「回転軸の回転半径」と、以下の表に示す「ロボットタイプ別アーム最大長」、「実装するツールのZ方向最大長」を加算した値をパラメータとして設定する必要があります。
- "A"および"B"をあわせ持つような、すなわちロボットが回転軸J8上(ターンテーブル等)に設置されており、かつ回転軸J7を持つツール(サーボハンド等)を実装している場合、それぞれの軸に該当する回転半径パラメータを設定する必要があります。
ロボットタイプ別アーム最大長
| シリーズ | ロボットタイプ | アーム最大長(mm) |
|---|---|---|
| VP | VP-5243 | 430 |
| VP-6242 | 432 | |
| VS | VS-6556 | 653 |
| VS-6577 | 854 | |
| VS-050 | 505 | |
| VS-060 | 605 | |
| VS-068 | 710 | |
| VS-087 | 905 | |
| VM | VM-6083 | 1021 |
| VM-60B1 | 1298 | |
| HS | HS-4535* | 350 |
| HS-4545* | 450 | |
| HS-4555* | 550 | |
| HSA1 | HS035A1* | 350 |
| HS045A1* | 450 | |
| HS055A1* | 550 | |
| HSR | HSR048A1* | 480 |
| HSR055A1* | 550 | |
| HSR065A1* | 650 | |
| HM | HM-4060* | 600 |
| HM-4A60* | 600 | |
| HM-4070* | 700 | |
| HM-4A70* | 700 | |
| HM-4085* | 850 | |
| HM-4A85* | 850 | |
| HM-40A0* | 1000 | |
| HM-4AA0* | 1000 |
ID : 4903