
ID : 3328
MC8シリーズ制御ロボット × 2 外部軸のみ
ここでは、システム構成の内容を、下記項目に分けて説明しています。
システム構成図
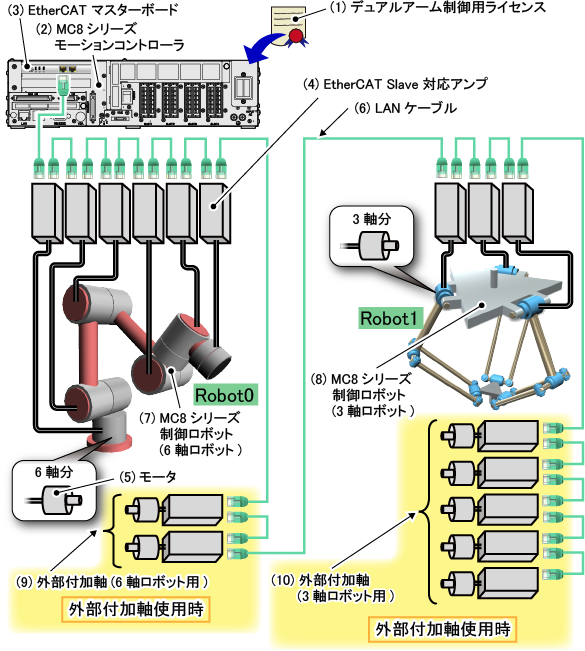
全体のシステム構成は下図のようになります。
(下図は、MC8シリーズ制御ロボットとして、6軸ロボットと3軸ロボットを制御する例です。)
構成品の説明
| 構成品 | 内容 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
(1) デュアルアーム制御用ライセンス |
デュアルアーム制御用のライセンスが必要です。詳細は"ライセンス"を参照してください。 |
||||||||||
(2) MC8シリーズモーションコントローラ |
MC8シリーズ制御ロボット2台を制御するコントローラです。 上記システムでは、MC8またはMC8Aのどちらも使用可能です。 上記システム構成は、UL仕様のMC8シリーズモーションコントローラでも同じです。 外形や仕様など、詳細内容は"MC8シリーズ(モーションコントローラ)取扱説明書"を参照してください。 |
||||||||||
(3) EtherCAT マスターボード |
外部軸とEtherCAT通信するためのボードです。 使用するためにはソフトウェアライセンスが必要です。 ソフトウェアライセンスとボードとの組み合わせにより、下記のような製品を用意しています。
|
||||||||||
(4) EtherCAT Slave 対応アンプ |
使用できるアンプがあらかじめ決められています。"外部付加軸(EtherCAT)取扱説明書"の"ハードウェア接続構成"内にある"EtherCAT Slave対応アンプ"を参照してください。 |
||||||||||
(5) モータ |
外部軸のモータです。ご使用されるEtherCAT Slave 対応アンプで動作するものをご使用ください。 | ||||||||||
(6) LANケーブル |
EtherCAT通信用のケーブルです。 カテゴリ5以上でツイストペアのものをご使用ください。 結線方式は、ストレートとクロスのどちらも使用できます。
|
||||||||||
(7) MC8シリーズ制御ロボット (6軸ロボット) |
お客様にて設計、製作していただくロボットです。 ロボット名が、Robot0とRobot1のどちらになるのかは、そのロボットに接続されているEtherCAT Slave 対応アンプに関係しています。 EtherCAT マスターボードに最初に接続されたEtherCAT Slave 対応アンプから順に、Robot0の1軸、Robot0の2軸と割り当てられます。 より詳しい内容については、"外部軸の各ロボットへの割当て"を参照してください。 なお、キネマティクス設定を使用する場合、有償のソフトウェアライセンスが必要です。
キネマティクス設定に関しては、"MC8シリーズ(モーションコントローラ)取扱説明書"の"キネマティクス設定"を参照してください。 |
||||||||||
(8) MC8シリーズ制御ロボット (3軸ロボット) |
|||||||||||
(9) 外部付加軸 (6軸ロボット用) |
付加軸を使用する場合、上図のように接続することで使用可能です。 使用可能な軸数は、ロボット1台あたり、以下の軸数です。
使用しない場合は、接続しないでください。 |
||||||||||
(10) 外部付加軸 (3軸ロボット用) |
注意事項
-
各機器を実際に接続する場合、下記の参照先をお読みいただき、安全に実施してください。
参照先 - "RC8シリーズロボットコントローラ説明書"の"設置"
- "外部付加軸(EtherCAT)取扱説明書"の"ハードウェア接続構成"
-
システムの設計や操作をする場合、下記の参照先をお読みいただき、安全に実施してください。
参照先
ID : 3328