
ID : 3347
UL仕様以外の場合
ここでは、システム構成の内容を、下記項目に分けて説明しています。
システム構成図
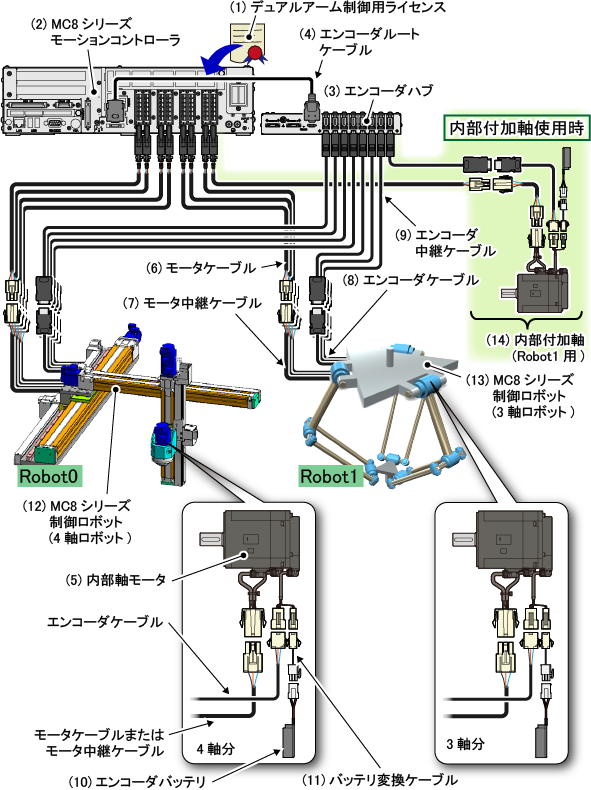
全体のシステム構成は下図のようになります。
(下図は、MC8シリーズ制御ロボットとして、4軸ロボットと3軸ロボットを制御する例です。)
構成品の説明
| 構成品 / 品番(型式) |
内容 | ||||||
|---|---|---|---|---|---|---|---|
(1) デュアルアーム制御用のライセンス |
詳細は"ライセンス"を参照してください。 |
||||||
(2) MC8シリーズモーションコントローラ |
MC8シリーズ制御ロボット2台を制御するコントローラです。 上記システムでは、MC8またはMC8Aのどちらも使用可能です。 外形や仕様など、詳細内容は"MC8シリーズ(モーションコントローラ)取扱説明書"を参照してください。 |
||||||
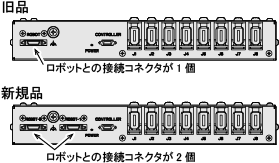
(3) エンコーダハブ(4) エンコーダルートケーブルエンコーダハブとエンコーダルートケーブルはセットになっています。 また、このセットは、旧品と新規品があります。
エンコーダルートケーブルの長さは、旧品、新規品ともに約 0.4 m です。 |
エンコーダハブ各内部軸のエンコーダ信号を集約し、MC8シリーズモーションコントローラに送信する機器です。 上記システムでは、旧品と新規品のどちらも使用可能です。
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。 エンコーダルートケーブルエンコーダハブとMC8シリーズモーションコントローラをつなぐケーブルです。 新規品のエンコーダハブには、旧品のエンコーダルートケーブルは使用できません。新規品のエンコーダハブには必ず、新規品のエンコーダルートケーブルをご使用ください。 |
||||||
(5) 内部軸モータ"ACサーボモータ一覧"を参照。 |
MC8シリーズ制御ロボットの各軸として使用するモータです。"ACサーボモータ一覧"から任意のモータを選択してください。 |
||||||
(6) モータケーブル
|
内部軸モータに電力を供給するケーブルです。 上図ではモータ中継ケーブルを介して、内部軸モータと接続していますが、直接内部軸モータに接続することも可能です。 任意の長さのものをご使用ください。 |
||||||
(7) モータ中継ケーブル
|
モータケーブルと内部軸モータを接続するケーブルです。 ロボット内部や、ケーブルベヤなど、動作する箇所にモータケーブルを通す場合、その部分のケーブルは傷みやすくなります。その部分を、モータ中継ケーブルにしておくことで、ケーブルが傷んだりした場合、モータ中継ケーブルのみを交換するだけで済みます。 任意の長さのものをご使用ください。 |
||||||
(8) エンコーダケーブル
|
内部軸モータのエンコーダ線をエンコーダハブに接続するケーブルです。 上図ではエンコーダ中継ケーブルを介して、エンコーダハブと接続していますが、直接エンコーダハブに接続することも可能です。 任意の長さのものをご使用ください。 |
||||||
(9) エンコーダ中継ケーブル
|
エンコーダケーブルとエンコーダハブを接続するケーブルです。 ロボット内部や、ケーブルベヤなど、動作する箇所にエンコーダケーブルを通す場合、その部分のケーブルは傷みやすくなります。その部分のみエンコーダケーブルを通し、その先はエンコーダ中継ケーブルにしておくことで、ケーブルが傷んだりした場合、エンコーダケーブルのみを交換するだけで済みます。 任意の長さのものをご使用ください。 |
||||||
(10) エンコーダバッテリ410611-003* |
内部軸モータのエンコーダ情報を記憶させておくためのバッテリです。 |
||||||
(11) バッテリ変換ケーブル410611-614* (0.5 m) |
エンコーダバッテリと内部軸モータを接続するケーブルです。 |
||||||
(12) MC8シリーズ制御ロボット(4軸ロボット) |
お客様にて設計、製作していただくロボットです。 ロボット名が、Robot0とRobot1どちらになるのかは、そのロボットが接続されているモータコネクタによって決まります。 各モータコネクタには軸番号が割り振られていて、若い軸番号から順にRobot0に割り当てられます。 Robot0に割り当てる軸数の設定は、協調制御·デュアルアームツールで行います(Robot1も同じです)。 協調制御·デュアルアームツールでの設定方法については、"セットアップ"の"MC8シリーズ制御ロボット × 2 (内部軸のみ)"を参照してください。 また、各モータコネクタに割り振られる軸番号については、"付加軸取扱説明書"の"配線上の注意"を参照してください。 なお、キネマティクス設定を使用する場合、有償のソフトウェアライセンスが必要です。
キネマティクス設定に関しては、"MC8シリーズ(モーションコントローラ)取扱説明書"の"キネマティクス設定"を参照してください。 |
||||||
(13) MC8シリーズ制御ロボット(3軸ロボット) |
|||||||
(14) 内部付加軸(Robot1用) |
付加軸を使用する場合、上図のように接続することで使用可能です。 どの軸をロボットとし、どの軸を付加軸にするかは、キネマティクス設定ツールで行います。 キネマティクス設定ツールによる設定方法については"セットアップ"の"MC8シリーズ制御ロボット × 2 (内部軸のみ)"を参照してください。 |
注意事項
-
各機器を実際に設置/接続する場合、下記の参照先をお読みいただき、安全に実施してください。
"MC8シリーズ(モーションコントローラ)取扱説明書"の"システム構成"内にある"全体システム構成"
-
システムの設計や操作をする場合、下記の参照先をお読みいただき、安全に実施してください。
ID : 3347