
ID : 3135
TrackAbsMove S
構文
TrackAbsMove S [, パス開始変位量],経路番号[, 動作オプション]
指定項目
解説
追従動作を行いながら、指定した経路番号の経路を自由曲線補間動作する作業動作を行います。軌道は滑らかな曲線になります。TCP点は加減速時を除き、曲線上を一定速度で動作します。
このコマンドを実行するには、タスクがロボット軸の制御権を取得しなければなりません。
注意事項
- コンベアトラッキング専用のコマンドです。
- TrackStartと、TrackStopの間でのみ使用可能です。
-
外部速度、内部速度による制限は、作業動作である「Move S」動作にのみ効果があります。
追従動作に対しては効果がありません。 -
指定した経路番号の経路点がない場合はエラーになります。
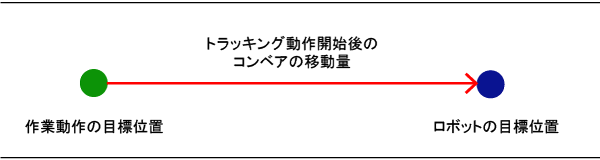
- 実際にロボットが到達する位置は、下図のように、作業動作の目標位置を、トラッキング動作開始から作業動作が終了するまでの間のコンベアの移動量分だけオフセットさせた位置になります。このオフセットはTrackStopでリセットされます。
用例
TakeArm Keep = 0
Do
Move P, P0 '待機位置へ移動
Wait IO[10] = On '作業を行うワークが動作開始位置を通過するのを待つ
TrackStart 1, 1 'トラッキングモード開始
TrackAbsApproach P, P10, 30 'P10 の上空への作業動作を行うトラッキング動作を実行
TrackAbsMove L, P10 'P10 への作業動作を行うトラッキング動作を実行
TrackAbsMove S, 10'経路番号10の自由曲線動作を行うトラッキング動作を実行
TrackDepart L, 30 '上空への作業動作を行うトラッキング動作を実行
TrackStop 'トラッキングモード終了
Loop Until IO[128] = On
ID : 3135