
ID : 519
パス開始変位量
"パス開始変位量"とは動作ステートメントが目標位置に向かって動作している途中で次の行の命令を始めるタイミングを指定するものです。
動作ステートメントの目標位置オプションとして"@[パス開始変位量]"の書式で整数型データを指定します。目標位置までのおおよその距離を、mm単位で指定します。
例
Move L, @[50] PosA
Move L, PosB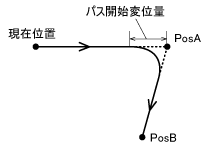
上記は指令値が目標位置PosAまであと50mm以内になったときに次行のPosBへの移動命令を実行します。
パス開始変位量で指定できる次の行を実行するタイミングは動作が減速を始めたときから、停止(エンコーダ値が目標位置に到達したことを確認)するまでです。
パス開始変位量の指定の種類
| 指定値 | 動作の名称 | 内容 |
|---|---|---|
| >0 | 位置指定のパス動作 | 指令値と目標位置までの距離が指定した数値より近づいたタイミングで次行を実行します。
|
| =0 | エンド動作 | 指令値が目標位置に到達したタイミングで次行を実行します。
|
| =-1 もしくは @P | パス動作 | 減速を始めたタイミングで次行を実行します。"@P"と記述することもできます。
|
| =-2 もしくは @E | エンコーダ値確認動作(各軸位置) | 各軸の現在位置(エンコーダ値)が目標位置に到達したことを確認したタイミングで次行を実行します。"@E"と記述することもできます。
|
| =-6 もしくは@C | エンコーダ値確認動作(手先位置・姿勢) | エンコーダ値を元に座標変換された手先の位置、姿勢が目標に到達したことを確認したタイミングで次行を実行します。"@C"と記述することもできます。
CrtMotionAllowコマンドで、判定に使用する位置精度と姿勢精度を変更することができます。 |
現在位置(エンコーダ値)による位置指定のパス動作
位置指定のパス動作で "@[パス開始変位量]" でなく "@a[パス開始変位量]" を指定すると、現在位置(エンコーダ値)と目標位置までの距離が指定した数値より近づいたタイミングで次行を実行します。
なお、パス開始変位量は、整数型データで指定します。
Move L, @a[50] P[10]位置指定のパス動作は誤差が生じることがありますので、指定する数値は目安としてください。
エンコーダ値確認動作の判定モード変更
振動的な動作の場合、エンコーダ値確認動作(@E、@C)で目標位置に到達したと判断した後に、振動により目標位置から動くことがあります。このとき、使用条件一覧のエンコーダ値確認動作の判定モードを変更することで、振動が収まるのを待ってから次行を実行することができます。
ただし、エンコーダ値確認動作の判定モードを変更した場合には、振動が収まることを確認する分だけ、実行時間が伸びることがあります。
使用条件一覧については、機能ガイドの「使用条件一覧表」を参照してください。
下記番号の項目が関連します。
- No.171:手先エンコーダ値確認動作停止判定モード
- No.172-179:各軸エンコーダ値確認動作停止判定モード
- No.180:手先エンコーダ値確認動作停止判定時間
- No.181-188:各軸エンコーダ値確認動作停止判定時間
ID : 519