
ID : 5377
TrackStart
構文
TrackStart コンベア番号 [, オプション設定 ]
指定項目
- コンベア番号
-
使用するコンベア番号(1~16)を整数型データで指定します。
(Ver.1.11.*以前はコンベア1、コンベア2のみ指定可能です。) - オプション設定
-
トラッキングモード中の挙動に対するオプション設定を整数型データで指定します。 省略可能です。省略すると"-1"を指定したことになります。この項目はVer.1.8.*から使用可能です。
オプションは3つあり、同時に有効にすることも可能です。設定値の組み合わせは、以下の通りです。設定値 速度追従オプション 有効 下流限界エラーオプション 有効 姿勢固定オプション 有効 -1 - - - 1 ◯ - - 2 - ◯ - 3 ◯ ◯ - 4 - - ◯ 5 ◯ - ◯ 6 - ◯ ◯ 7 ◯ ◯ ◯ 設定値の4~7は、ロボットコントローラのソフトウェアバージョンが、Ver.2.8.0以降から使用可能です。
各オプションの機能内容は以下の通りです。
オプション 設定 内容 速度追従オプション (*1) 有効 トラッキング動作開始後のコンベアの速度変化に追従して動作します。 無効 トラッキング動作開始時のコンベア速度のまま動作をします。 下流限界エラーオプション 有効 ワークがトラッキング範囲下流限界を越した場合、エラーを発生させません。 無効 ワークがトラッキング範囲下流限界を越した場合、エラーを発生させます。 姿勢固定オプション (*2) 有効 ターンテーブルの回転角度に関わらず、手先の姿勢を一定に保ちながら動作します。 無効 ターンテーブルの回転にあわせて、手先の姿勢を回転させながら動作します。 *1 : 付加軸トラッキングでは速度追従オプションは常に有効です。
-
*2 : 円形トラッキング使用時における、手先の姿勢制御のオプションです。詳細は"手先の姿勢制御の種類"を参照してください。
ロボットコントローラのソフトウェアバージョンがVer.2.8.0以降から使用可能です。Ver.2.8.0より古い場合は、姿勢固定オプションを"無効"に指定したときと同じ動作をします。
コンベアトラッキングおよび付加軸トラッキング使用時は、姿勢固定オプションの有効/無効に関わらず、手先の姿勢は一定です。
解説
トラッキングモードを開始します。
このコマンドを実行しただけでは、ロボットは動作しません。
下記に示す、トラッキング動作コマンドを使用して、動作を指示します。
- TrackMove
- TrackApproach
- TrackDepart
- TrackDraw
- TrackAbsMove
- TrackAbsApproach
関連項目
TrackAbsApproach、 TrackAbsMove、 TrackApproach、 TrackDepart、 TrackDraw、 TrackMove、 TrackStop、 TrackTargetPos、 TrackTargetRelease、 エリア機能を使った設備の保護、 コンベアトラッキング用コマンド、 円形トラッキング用コマンド
注意事項
- コンベアおよび円形トラッキング専用のコマンドです。
- トラッキングモード中は、ステップ送り、ティーチチェックではエラーになります。
- END命令では、設定したオプション設定は有効のままです。
- 電源を切ると、設定したオプション設定は無効になります。
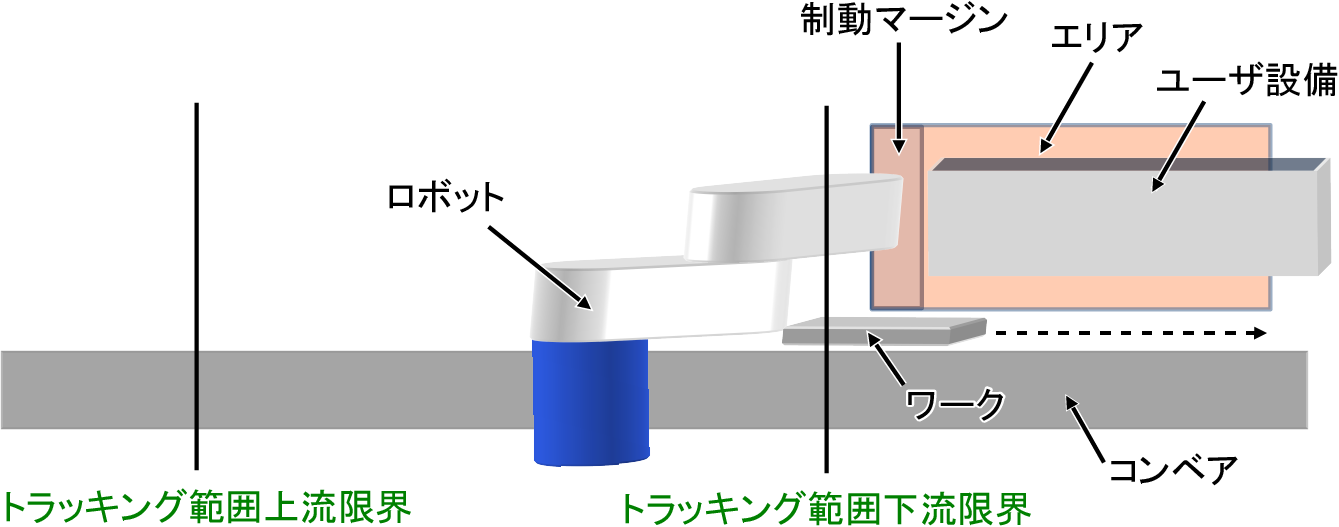
- オプション設定の下流限界エラーオプションを有効にした場合、ロボットはトラッキング範囲下流限界を超えて動作します。トラッキング範囲下流限界の後方に設備された設備との干渉に十分注意してください。エリア機能を使用して干渉チェックを行うことを推奨します。
- 排他制御とコンベアトラッキングの同時使用はVer.2.8.*以降で可能です。
ただし、排他制御による減速中にこのコマンドを実行することはできません。 - SS2、RSMによる減速中にこのコマンドを実行することはできません。
ID : 5377