
ID : 161
Approach
機能
基準位置から指定距離離れたアプローチ位置へ移動します。
構文
Approach 動作補間, 基準位置, アプローチ長[, 動作オプション]
指定項目
解説
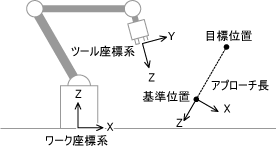
把持位置などの基準位置に対して,指定したアプローチ長離れた位置へ移動します。基準位置に対して基準位置のツール座標系-Z方向へアプローチ長離れた位置を目標位置にします。
このステートメントを実行するにはタスクがロボット軸の制御権を取得しなければなりません。
Move命令を使った置き換え
Approach命令はMove命令を使って以下のように書き換えることができます。
Approach P, P3, aaa↓
Move P, DevH(P3, P(0, 0, -aaa))関連項目
注意事項
目標位置の形態は基準位置の形態と同じになります。
目標位置オプションは基準位置ではなくアプローチ長に付加します。
例
Approach P, P[10], @P 40 Ex(7,10), Speed = 30用例
'!TITLE "<ツール座標系指定での絶対動作>"
' 現在位置から指定値に移動する
Sub Sample_Approach
Dim aaa As Single
Dim bbb As Single
Dim ccc As Position
Dim ddd As Position
TakeArm Keep = 1
' P( 740, 0, 480, 180, 0, 180, -1 )の座標位置からアプローチ方向に30mm離れた位置へ移動
Approach P, P( 740, 0, 480, 180, 0, 180, -1 ), 30
aaa = 15.0
bbb = 30.0
ccc = P( 600, 100, 300, 180, 0, 180, -1 )
ddd = P( 500, 300, 400, 180, 0, 180, -1 )
' cccの座標位置からアプローチ方向に40mm離れた位置へ移動
Approach P, ccc, 40
' dddの座標位置からアプローチ方向にaaa(15mm)離れた位置へ速度90%で移動
Approach L, ddd, aaa, Speed = 90
' cccの座標位置からアプローチ方向にbbb(30mm)離れた位置へ速度50%で移動
Approach P, ccc, @P bbb, S = 50
End SubID : 161