
ID : 162
ArchMove
機能
アーチモーションします。
構文
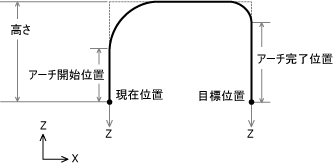
ArchMove 目標位置, 高さ[, アーチ開始位置[, アーチ完了位置]]
指定項目
関連項目
注意事項
ArchMoveへのパス動作はできません。ArchMoveの前の動作命令について目標位置オプションはパス動作以外を選択してください。
Move P, @0 P[0] '目標位置P[0]へエンド動作
ArchMove P[1], 20 '目標位置P[1]へ高さ20でアーチ動作用例
'!TITLE "目標位置へのアーチ動作移動"
' 現在位置から目標位置へのアーチ動作移動
Sub Sample_ArchMove
TakeArm Keep = 0
Dim aaa As Position
Dim bbb As Position
' 現在位置をaaaに代入
aaa = CurPos
bbb = Dev( aaa, P( -200, 50, 100, 0, 0, 0, -1 ) )
' 目標位置bbbへ高さ150でアーチ動作移動
ArchMove bbb, 150
' aaaの座標位置へ移動
Move P, aaa
' 目標位置bbbへ高さ150、アーチ開始位置、完了位置80でアーチ動作移動
ArchMove bbb, 150, 80, 80
End SubID : 162