
ID : 186
Depart
機能
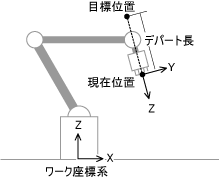
現在位置からツール座標-Z方向に移動します。
構文
Depart 動作補間, デパート長[, 動作オプション]
指定項目
解説
現在位置からツール座標-Z方向に移動します。
このステートメントを実行するにはタスクがロボット軸の制御権を取得しなければなりません。
目標位置の算出
目標位置は以下のように求めることができます。
TargetPos = DevH(DestPos, P(0, 0, -Length))'目標位置が可動領域内かを調べてから動作させる例
If OutRange(DevH(DestPos, P(0, 0, -Length))) = 0 Then
Depart P, Length
End If関連項目
注意事項
-
用例
'!TITLE "ツール座標系指定での相対動作"
' ツール座標系で指定した値分-Z軸方向へ移動する
Sub Sample_Depart
Dim aaa As Single
Dim bbb As Single
TakeArm Keep = 1
' 現在位置から70mm離れた位置へ移動
Depart P, 70
aaa = 20
bbb = 40
' 現在位置からaaa(20mm)離れた位置へ移動
Depart L, aaa, Speed = 90
' 現在位置からbbb(40mm)離れた位置へ移動
Depart L, bbb, S = 80
End SubID : 186