
ID : 1995
セットアップ手順
協調機能のセットアップ手順を以下に示します。
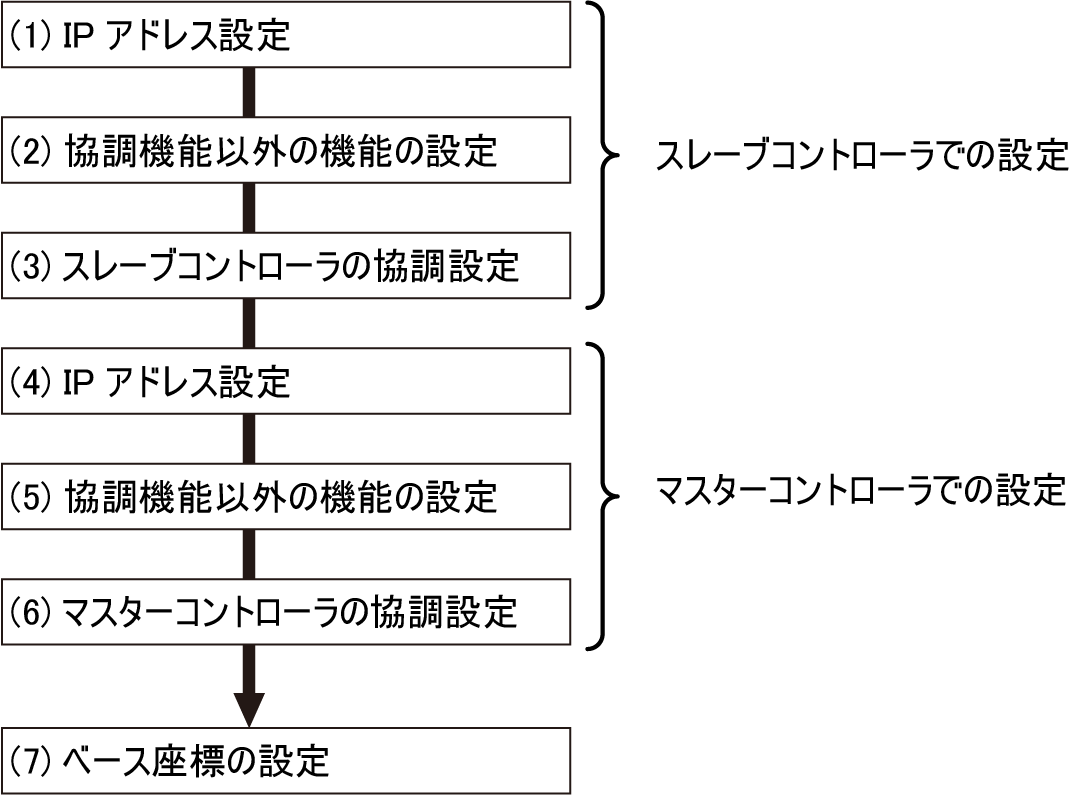
スレーブコントローラでの設定
ティーチングペンダントを使用して設定を行います。
(1) IPアドレスの設定
スレーブコントローラのIPアドレスの設定を行います。
IPアドレスの設定方法についてはティーチングペンダント操作ガイドの「通信設定画面の表示・変更」 を参照してください。
スレーブコントローラのIPアドレスにDHCPは使用できません。
(2) 協調機能以外の機能の設定
協調機能のほかに、付加軸や電動ハンドなどをスレーブコントローラで使用する場合、それらの機能の設定を行います。下記の参照先をご覧ください。
- 付加軸の設定方法については付加軸取扱説明書の「付加軸立上げ手順(ボールねじ)」を参照してください。
- 外部付加軸の設定方法については外部付加軸(EtherCAT)取扱説明書の「パラメータの設定」を参照してください。
- 電動ハンドの設定方法については、"協調機能での電動ハンドの使い方"を参照してください。
- 力センサの設定方法については、"協調機能での力センサの使い方"を参照してください。
- 協調機能と排他制御を同時に行う場合の設定方法については、"協調機能時の排他制御設定方法"を参照してください。
(3) スレーブコントローラの協調設定
協調機能に必要なライセンスの入力と、スレーブコントローラの協調設定を行います。
設定終了後はコントローラの電源を切り、ペンダントを外してから再起動します。
マスターコントローラでの設定
(4) IPアドレスの設定
マスターコントローラのIPアドレスの設定を行います。
設定方法はスレーブコントローラのIPアドレスの設定方法と同じです。
(5) 協調機能以外の機能の設定
協調機能のほかに、付加軸や電動ハンドなどをマスターコントローラで使用する場合、それらの機能の設定を行います。
設定方法はスレーブコントローラでの設定方法と同じです。
(6) マスターコントローラの協調設定
協調機能に必要なライセンスの入力、マスターコントローラの協調設定、およびスレーブコントローラのIPアドレス登録を行います。
(7) ベース座標の設定
マスターロボットとスレーブロボットそれぞれのベース座標を設定します。
ID : 1995