
ID : 2284
協調機能時の排他制御設定方法
排他制御と協調機能を同時に行う場合は、協調機能のマスタコントローラを、排他制御のマスタコントローラとして使用します。
協調機能と排他制御機能を併用するには、ロボットコントローラのソフトウェアバージョンが2.0.*以上である必要があります。
手順
排他制御の設定を行ってから、協調機能の設定を行います。
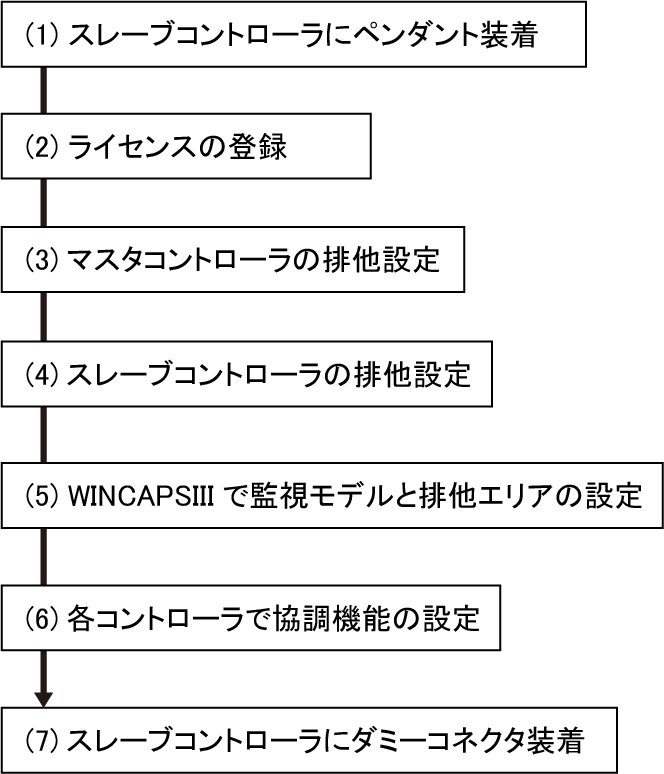
(1)スレーブコントローラにペンダント装着
スレーブコントローラの電源をOFFします。
装着してあるダミーコネクタをはずしティーチングペンダントを装着後、スレーブコントローラの電源をONします。エラーが出た場合は、解除してください。
(2)ライセンスの登録
各コントローラに排他制御と協調機能のライセンスを登録します。マスタ/スレーブコントローラ、それぞれに登録が必要です。
入力操作については、ティーチングペンダント操作ガイドの「機能拡張画面の表示、追加/削除」を参照してください。
すでにライセンスが登録されている場合、この操作は必要ありません。
(3)マスタコントローラの排他設定
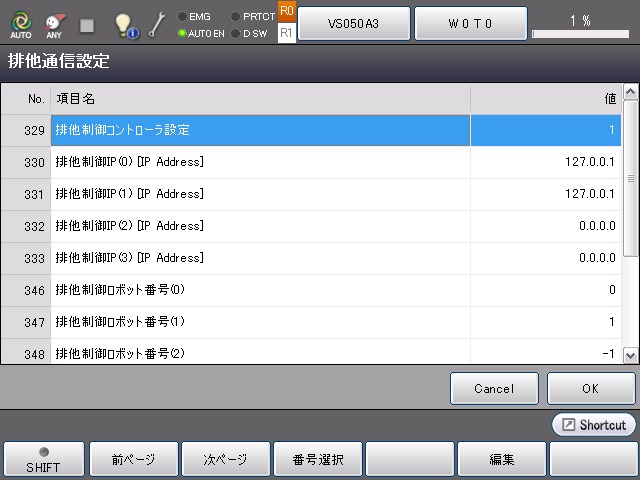
マスタコントローラで排他の設定を行います。
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F11 排他制御] - [F2 排他通信設定]
下記の内容に沿って設定してください。
| No. | 項目名 | 設定内容 | |
|---|---|---|---|
| 329 | 排他制御コントローラ設定 | "1 : マスタ"に設定します。 |
|
| 330 | 排他制御IP(0)[IP Address] | Robot0の設定 | 各ロボットについて、排他グループに入れるかどうかを設定します。
|
| 331 | 排他制御IP(1)[IP Address] | Robot1の設定 | |
| 332 | 排他制御IP(2) [IP Address] | Robot2の設定 | |
| 333 | 排他制御IP(3) [IP Address] | Robot3の設定 | |
| 346 | 排他制御ロボット番号(0) | Robot0の設定 | 協調機能で連動させるロボットのロボット名を設定します。連動させないロボットは"-1"を設定します。
|
| 347 | 排他制御ロボット番号(1) | Robot1の設定 | |
| 348 | 排他制御ロボット番号(2) | Robot2の設定 | |
| 349 | 排他制御ロボット番号(3) | Robot3の設定 | |
パラメータの詳細はパラメータリストの「VRC」を参照してください。
(4)スレーブコントローラの排他設定
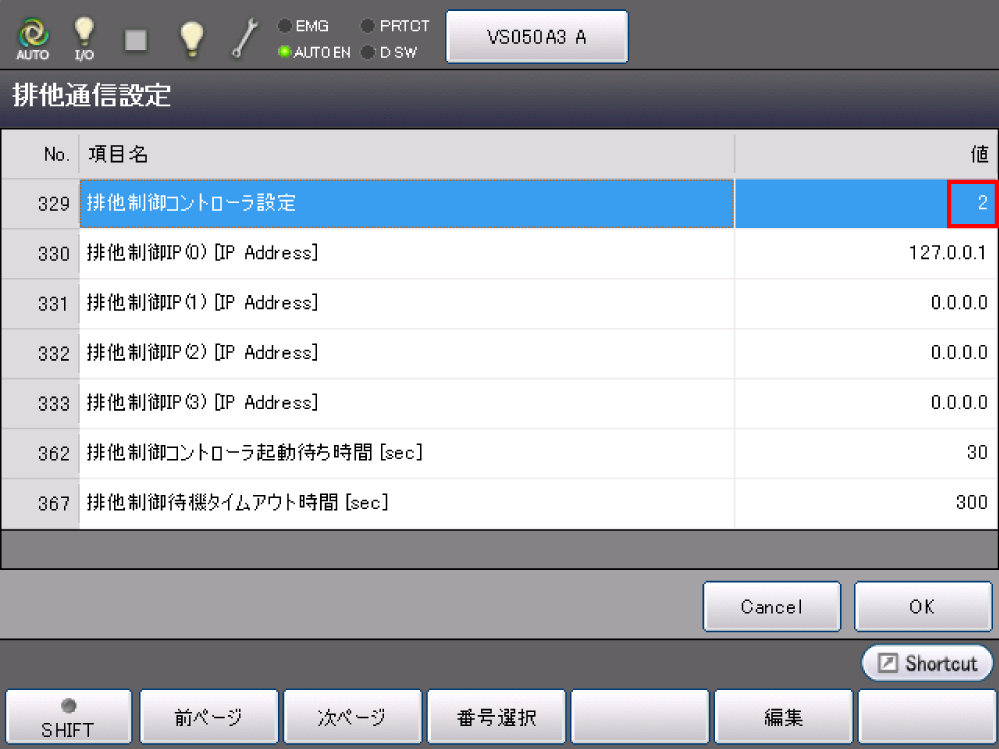
スレーブコントローラで排他のスレーブコントローラの設定を行います。
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F11 排他制御] - [F2 排他通信設定]
下記のパラメータを指定の値に設定します。
| No. | 項目名 | 値 | 内容 |
|---|---|---|---|
| 329 | 排他制御コントローラ設定 | 2 | このコントローラをスレーブコントローラとして使用します。 |
(5)WINCAPSIIIで監視モデルと排他エリアの設定
WINCAPSIIIにてマスター用プロジェクトとスレーブ用プロジェクトのそれぞれに対し、監視モデルと排他エリアを設定します。作成後、それぞれのコントローラにPCを接続し、プロジェクトデータを送信します。
詳しい通信方法は協調機能ガイドの「協調制御・デュアルアームツール」を参照してください。
(6)各コントローラで協調機能の設定
協調機能の詳しい設定方法は協調機能ガイドの「セットアップ手順」を参照してください。
(7)スレーブコントローラにダミーコネクタ装着
マスタ/スレーブコントローラの電源をOFFします。
スレーブコントローラに装着してあるペンダントをはずし、ダミーコネクタを装着後、マスタ/スレーブコントローラの電源を同時にONします。起動後、排他制御と協調機能が有効になります。
システム構成時の注意
排他制御のマスタコントローラにすることができるロボットコントローラ
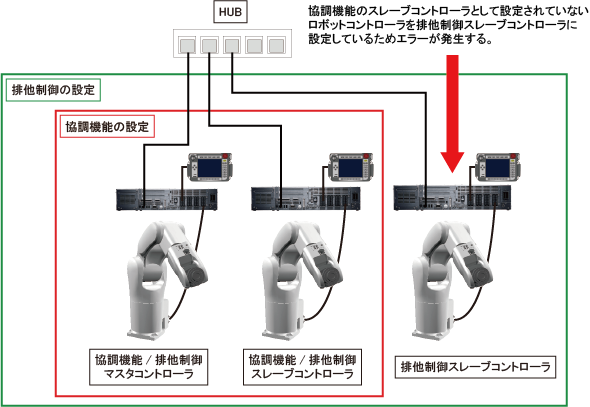
排他制御のマスタコントローラにすることができるロボットコントローラは、協調機能のマスタコントローラのみです。
排他制御のスレーブコントローラにすることができるロボットコントローラ
排他制御のスレーブコントローラにすることができるロボットコントローラは、協調機能のスレーブコントローラのみです。
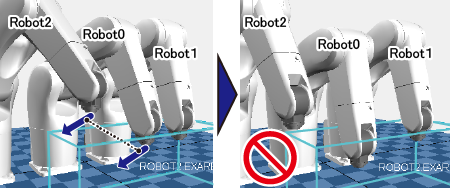
例えば、下図のように、各ロボットコントローラを設定すると、一番右のロボットコントローラはエラーを発生します。
協調コマンドを使用するときの注意
ロボットコントローラのソフトウェアバージョンによって、注意事項が異なります。
Ver.2.0.*~Ver.2.3.*まで
同期動作(SyncTimeコマンドを使用する動作)および、協調動作("SyncMove"動作オプションを使用する動作)を行う場合は、実行前にResetExclusiveAreaコマンドで排他エリアを無効にする必要があります。
Ver.2.5.*以降
排他エリアを有効にした状態で、同期動作(SyncTimeコマンドを使用する動作)および、協調動作("SyncMove"動作オプションを使用する動作)を実行できます。
ただし、同期動作または協調動作によって、複数のロボットが排他エリアに侵入した場合、それらのロボットは、排他エリアの外に移動するまで、同期動作または協調動作しかできません。
その逆のパターンも同じで、同期動作または協調動作以外の動作によって、ロボットが排他エリアに侵入した場合、そのロボットは、排他エリアの外に移動するまで、同期動作または協調動作以外の動作しかできません。
パターン別の詳細内容は以下の通りです。
同期動作または協調動作によって排他エリアに侵入した場合
- 排他エリアに侵入時の動作
-
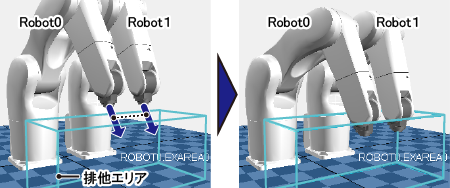
Robot0とRobot1を、同期動作または協調動作で、排他エリアに侵入させる。
(どちらかのロボットだけが排他エリアに侵入した場合も含みます。)
- その後の動作
-
可能な動作 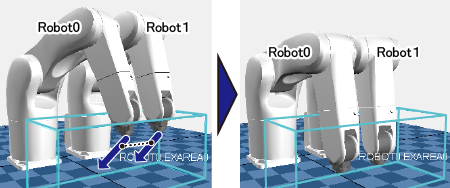
Robot0とRobot1を、同期動作または協調動作させる。
排他エリア内で複数のロボットを動作させることになります。ロボットどうしがぶつからないようにご注意ください(特に同期動作)。
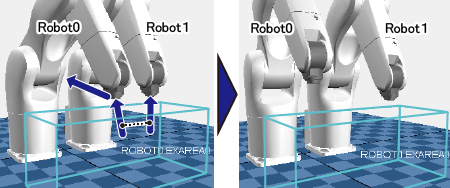
Robot0とRobot1を、同期動作または協調動作で、一旦排他エリアの外へ動作させた後、各ロボット単独で動作させる(上の図ではRobot0を単独で動作させている)。
不可能な動作 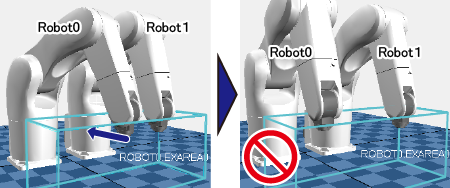
ロボット単独で動作させる(上の図ではRobot0を単独で動作させている)。
他のロボットと、同期動作または協調動作させる(上の図では、Robot0とRobot2を同期動作または協調動作させている)。
上の図において、Robot0とRobot1およびRobot2を、同期動作または協調動作させることもできません(連動させるロボットを増やす場合)。
また、Robot0とRobot1およびRobot2を、同期動作または協調動作で動作させて排他エリアに侵入させた場合、Robot0とRobot1だけでの同期動作または協調動作もできません(連動させるロボットを減らす場合)。
同期動作または協調動作以外の動作によって排他エリアに侵入した場合
- 排他エリアに侵入時の動作
-
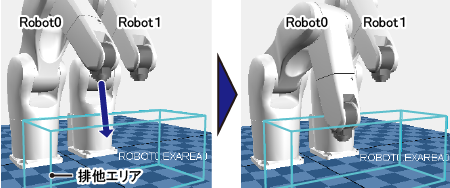
Robot0を単独で排他エリアに侵入させる。
- その後の動作
-
可能な動作 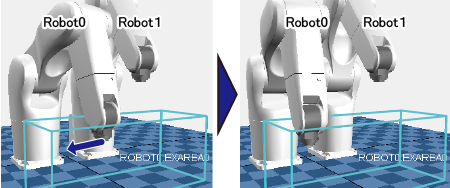
Robot0を単独で動作させる。
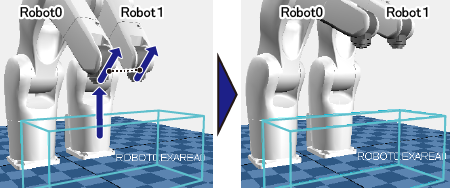
Robot0を単独で一旦排他エリアの外へ動作させた後、他のロボットと同期動作または協調動作させる(上の図ではRobot0とRobot1を同期動作または協調動作させている)。
不可能な動作 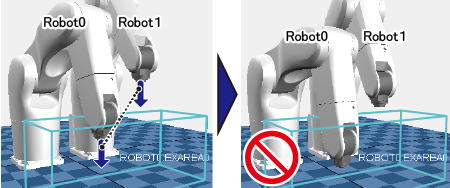
他のロボットと同期動作または協調動作させる(上の図ではRobot0とRobot1を同期動作または協調動作させている)。
ID : 2284