
ID : 1998
マスターコントローラの協調設定
協調機能に必要なライセンスの入力、マスターコントローラの設定、およびスレーブコントローラのIPアドレスの登録を行います。マスターコントローラの協調機能のライセンスは有償です。
ライセンスについては「オプション機能とライセンス」を参照してください。
協調機能のライセンス追加
操作経路:[F6 設定] - [F8 オプション] - [F1 機能拡張]
コントローラに協調機能のライセンスを追加します。
外部付加軸機能を使用する場合は、外部付加軸機能のライセンスも追加します。
詳細はティーチングペンダント操作ガイドの「機能拡張画面の表示、追加/削除」を参照してください。
コントローラの設定
操作経路:[F6 設定] - [F9 協調]
この操作を行うには、ユーザレベルを「メンテナ」に指定してください。
上記操作経路どおりに操作すると、次のような"協調設定"ウィンドウが表示されます。
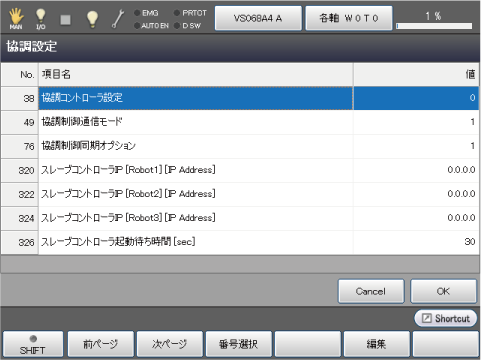
"協調設定"ウィンドウで、下記の設定を行います。
| 協調コントローラ設定 | "マスターコントローラ : 1" に設定します。 | ||||
|---|---|---|---|---|---|
| 協調制御通信モード | ロボットコントローラどうしの通信方法を設定します。通信方法に対する設定値は、以下のとおりです。
ロボットコントローラのソフトウェアバージョンが2.3.* 以上の場合は、1: "EthernetとEtherCATを併用" がデフォルトとして設定されています。 Ethernetのみを使用する場合には、協調制御通信モードの値を "0" に変更してください。 |
||||
| 協調制御同期オプション |
複数ロボットに動作をさせる場合に、動作開始タイミングのずれを抑えるための機能です。詳しくは「SyncMoveオプション(協調機能オプション)」を参照してください。 |
||||
| スレーブコントローラのIP | スレーブコントローラIPのIPアドレスを入力します。 "0.0.0.0"と入力された以降のスレーブコントローラは無効になります。 |
||||
| スレーブコントローラ起動待ち時間の設定 | マスターコントローラは、電源立ち上げ時にスレーブコントローラとの通信を確立しようとします。しかし、通信を確立し始めてから一定時間過ぎても通信が確立できないと、エラーを発生します。エラーが発生しないようにするためには、マスターコントローラとスレーブコントローラの電源立ち上げタイミングを、できる限り合わせてください。それでもエラーが発生する場合は、このパラメータ値を増やしてください。 |
必要項目入力後、コントローラを再起動します。
スレーブコントローラの確認
マスターコントローラの電源を切ります。その後、全てのロボットコントローラを同時に起動します。
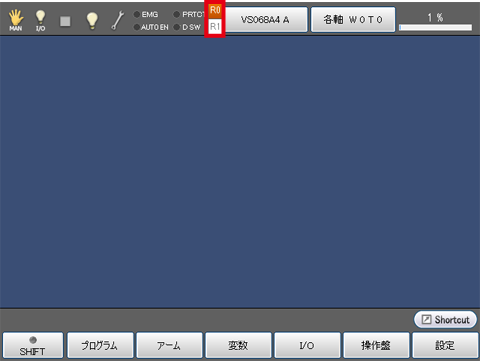
画面の上に協調用ロボット名が表示されていることを確認します。
下図は2台のロボットを連動させる場合の画面です。
ID : 1998