
ID : 1996
スレーブコントローラの協調設定
協調機能に必要なライセンスの入力と、スレーブコントローラの協調設定を行います。
スレーブコントローラの協調機能のライセンスは無償です。
ライセンスの入手方法は「オプション機能とライセンス」を参照してください。
協調機能のライセンス追加
操作経路:[F6 設定] - [F8 オプション] - [F1 機能拡張]
コントローラに協調機能のライセンスを追加します。
詳細はティーチングペンダント操作ガイドの「機能拡張画面の表示、追加/削除」を参照してください。
コントローラの設定
操作経路:[F6 設定] - [F9 協調]
この操作を行うには、ユーザレベルを「メンテナ」に指定してください。
上記操作経路どおりに操作すると、次のような"協調設定"ウィンドウが表示されます。
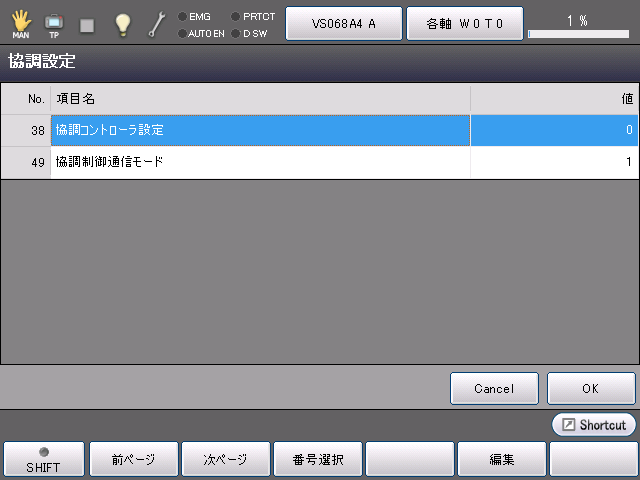
"協調設定"ウィンドウで、下記の設定を行います。
| 協調コントローラ設定 | スレーブコントローラのコントローラ番号を設定します。
例えば、"スレーブコントローラ1 : 2"に設定した場合、そのスレーブコントローラにつながるロボットのロボット名は"Robot1"となります。 |
||||||||
|---|---|---|---|---|---|---|---|---|---|
| 協調制御通信モード | ロボットコントローラどうしの通信方法を設定します。通信方法に対する設定値は、以下のとおりです。
ロボットコントローラのソフトウェアバージョンが2.3.* 以上の場合は、1: "EthernetとEtherCATを併用" がデフォルトとして設定されています。 Ethernetのみを使用する場合には、協調制御通信モードの値を "0" に変更してください。 |
ペンダントを外し再起動
設定完了後は、コントローラの電源を切り、ペンダントを外し、ペンダントレス用ダミーコネクタを装着します。マスターコントローラの協調設定終了後、マスターコントローラと同時にスレーブコントローラも起動します。
ID : 1996