
ID : 1999
ベース座標の設定
各ロボットのベース座標を設定します。
ベース座標の設定方法には、直接入力で設定する方法と簡単教示による設定方法の2つがあります。
マスターコントローラにて、すべてのロボットのベース設定を行えます。
この操作を行なうには、マスタコントローラとスレーブコントローラがLANで接続されており、スレーブコントローラが起動している必要があります。
直接入力で設定する方法
2台のロボットを連動させる場合の設定方法を説明します。
1
Robot0のベース設定を行います(Robot1から行っても問題ありません)。
ティーチングペンダントによるロボットの操作や設定は、基本的にリーダに指定されているロボットに対して行われます。
したがって、まずは、Robot0をリーダに指定します。
画面上部にある「ロボット選択]ボタンを押して、次のような「ロボット選択」画面を表示します。
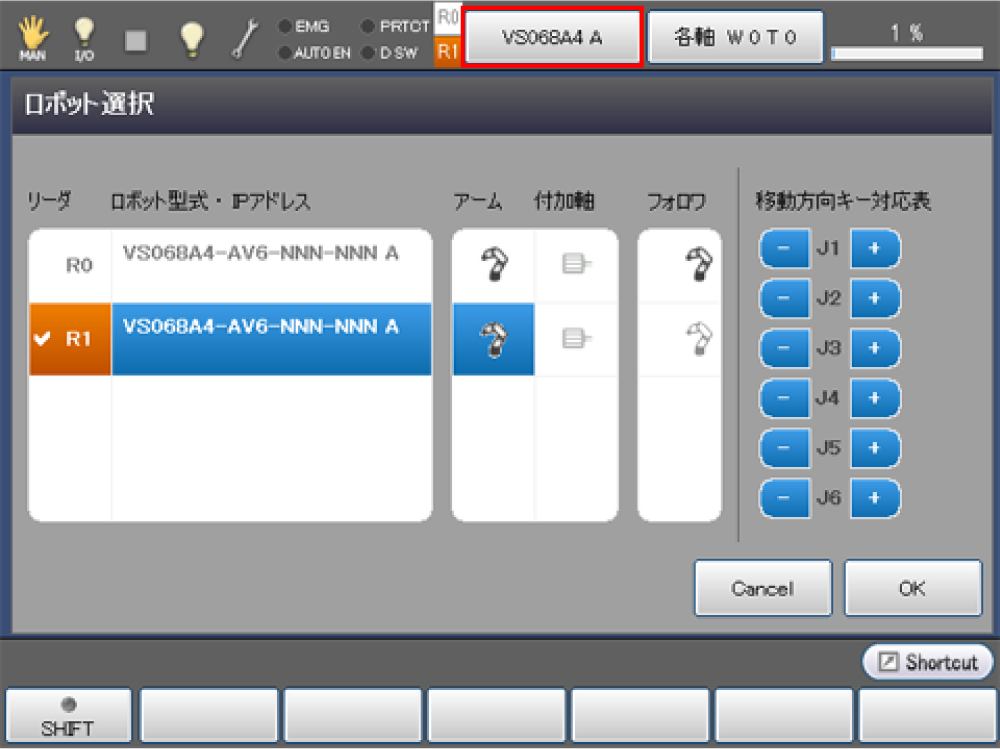
2
"R0"を選択して「OK」を押します。
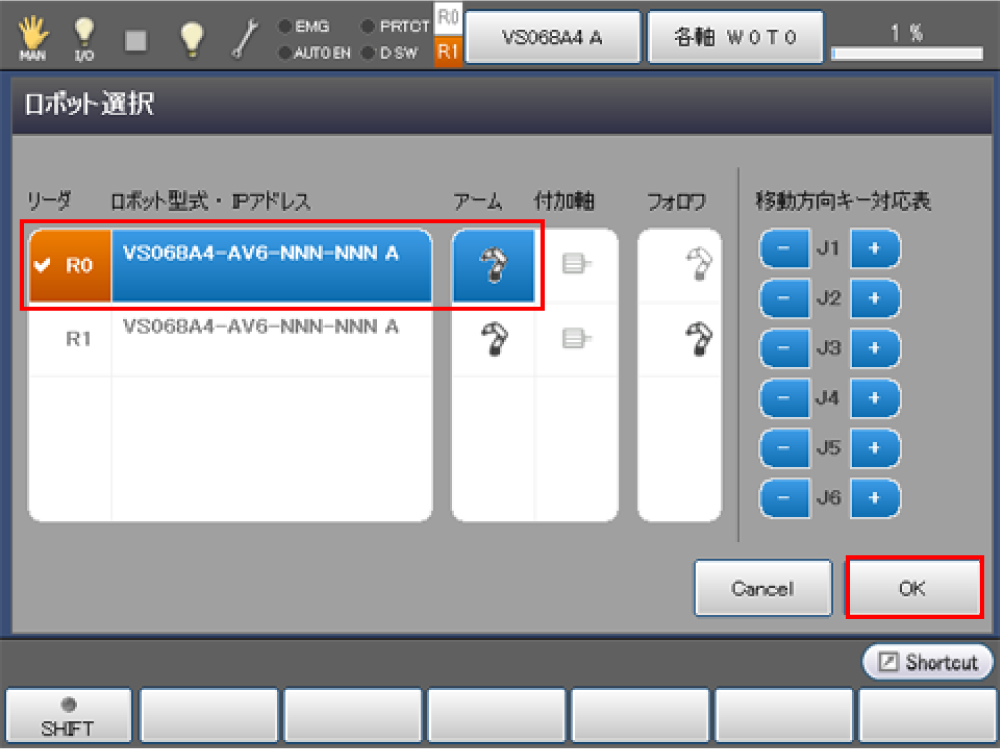
Robot0がリーダに指定されました。
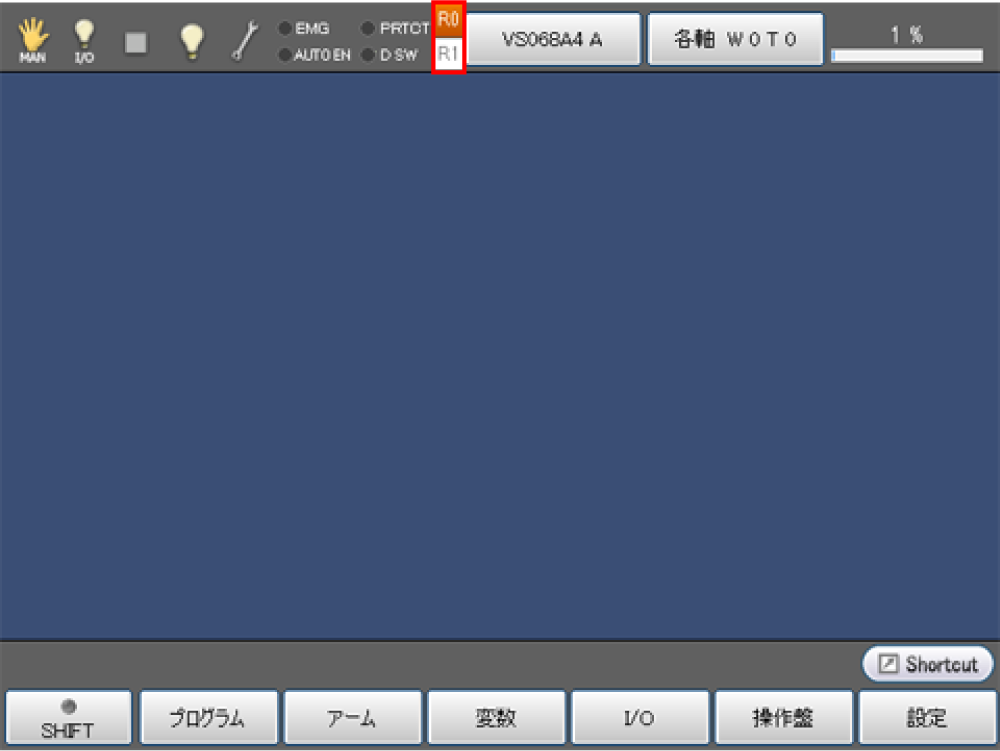
3
基本画面 - [F2 アーム] - [F6 補助機能] - [F10 ベース]を押します。
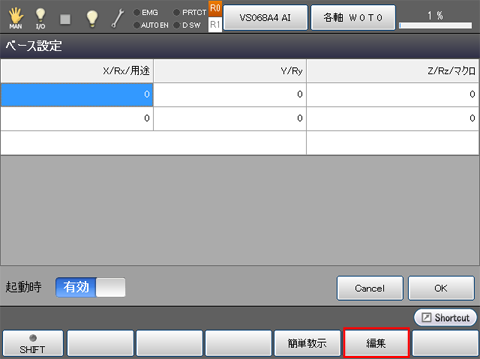
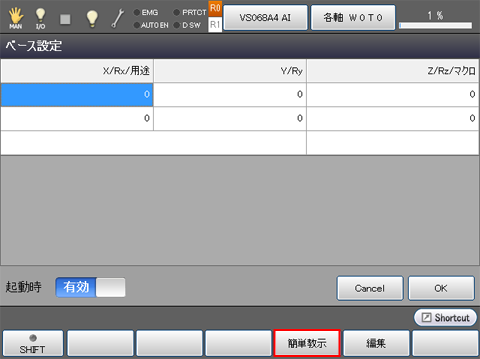
「ベース設定」画面が表示されます
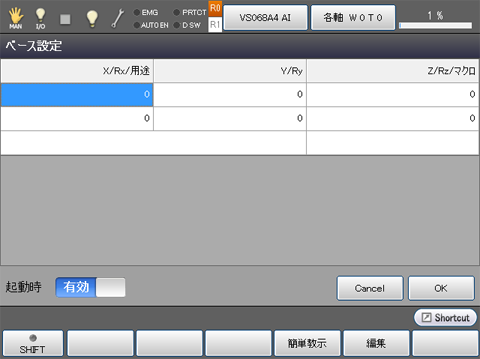
4
入力したい項目を選択して[F5 編集]を押します。
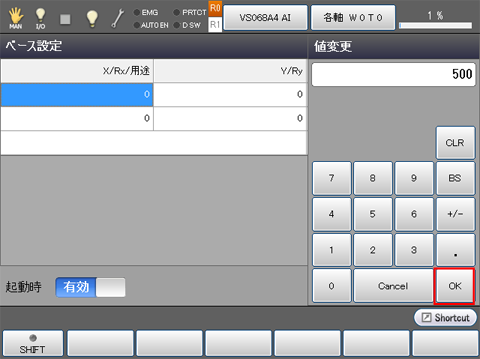
5
テンキーが表示されますので、テンキーを使って値を入力して「OK」を押します。
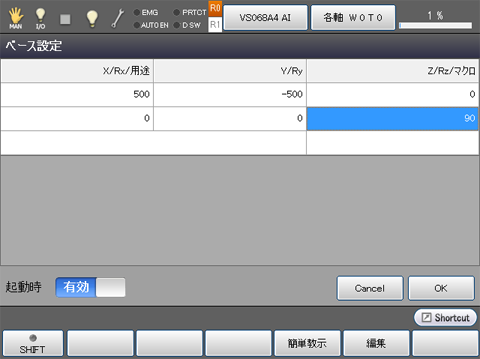
6
STEP4、5を繰り返して必要項目を入力します。
7
全て入力したら、起動時が"有効"になっていることを確認して「OK」を押します。
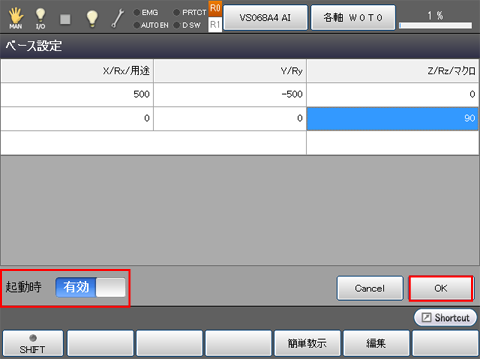
- 用途欄、マクロ欄は表示のみで編集できません。
- 設定された値は即座に反映されます。
Robot0のベース設定は終了です。
8
Robot1のベース設定も同じ手順で行ってください。その後、すべてのロボットコントローラを同時に再起動します。
起動時"有効"は再起動するまで有効になりません。
9
基本画面 - [F2 アーム]を押し、[LOCK]を押して、設定されたベース座標にロボットがあることを確認します。
手動モードで確認してください。
簡単教示による設定方法
2台のロボットを連動させる場合の設定方法を説明します。
あらかじめRobot0とRobot1のワールド座標系の原点、X軸方向の点、X-Y平面上の点の3点をティーチングして、位置座標(P型変数)に登録し、その登録した位置座標のデータを用いてベース座標の設定を行います。
各点については、下表を参照してください。
| X軸上の点 | X軸上のX>0の任意の点を指定します。 |
|---|---|
| X-Y平面上の点 | X-Y平面上のY>0(第1象限、第2象限)の任意の点を指定します。 Y<0の点を指定すると、Y軸、Z軸の方向が意図しない向きになる可能性があります。 また、Y=0の点を指定した場合は、計算不能で計算結果は出力されません。 |
簡単教示による3点のティーチングを行う場合は、Work0(ベース座標)で行ってください。
ティーチング方法は、”リーダロボットの位置取り込み”を参照してください。
リーダの切り替え方法とベース設定画面の表示までは、直接入力で設定する方法のSTEP1~3と同じです。
1
Robot0のベース設定を行います(Robot1から行っても問題ありません)。
直接入力で設定する方法のSTEP1~3を実施し、Robot0のベース設定画面を開きます。
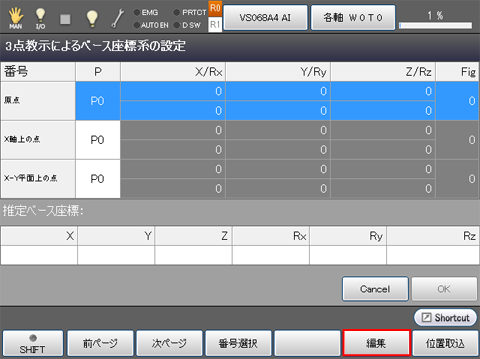
その後、「ベース設定」画面の[F4 簡単教示]を押します。
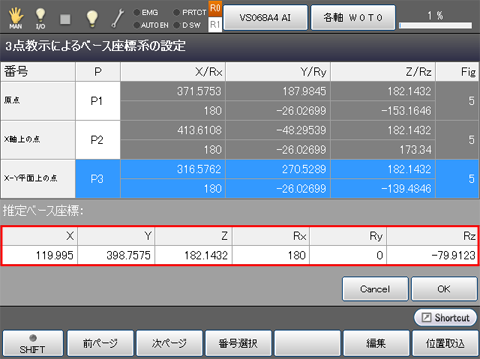
「3点教示によるベース座標系の設定」画面が表示されます。
2
「原点」欄を選択して、[F5 編集]を押します。
3
テンキーが表示されますので、テンキーを使って原点の座標が登録してある変数番号を入力して「OK」を押します。
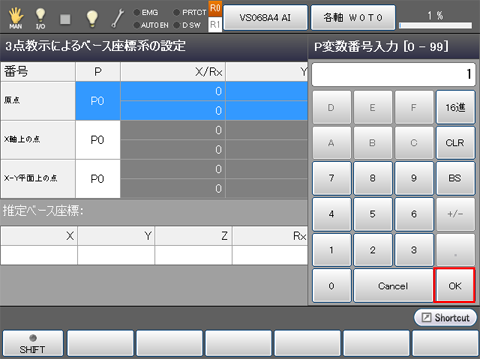
X軸方向の点、X-Y平面上の点も同じ手順で登録します。
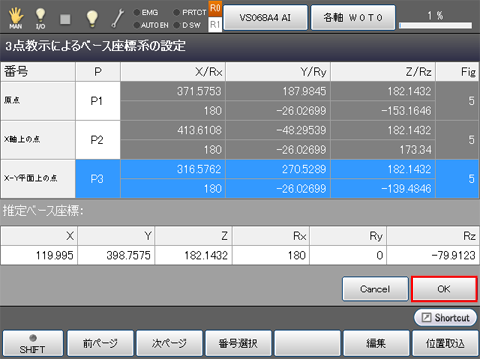
全ての点を登録すると「推定ベース座標」の値が確定します。
4
[OK]を押すと、ベース座標が確定します。
5
起動時が"有効"になっていることを確認して「OK」を押します。
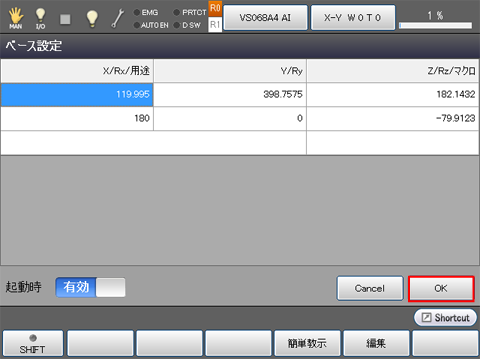
Robot0のベース設定は終了です。
6
Robot1のベース設定も同じ手順で行ってください。その後、すべてのロボットコントローラを同時に再起動します。
起動時"有効"は再起動するまで有効になりません。
7
ベース座標の確認は直接入力で設定する方法のSTEP9と同じです。
ID : 1999