
ID : 3316
協調機能での力センサの使い方
この機能は、ロボットコントローラのソフトウェアバージョンが、2.5.*以降から使用可能です。
マスターコントローラに接続されたティーチングペンダントにて、各ロボットコントローラに 接続されている力センサを設定できます。
また、プログラミング時には、Robot名を使用して、どの力センサの情報を読み込むかを指定することができます。
ここでは、上記内容について、下記項目に分けて説明しています。
設定方法
基本的に、マスターコントローラから設定可能ですが、次の内容は、該当するロボットコントローラにて行ってください。
- 力センサ有コンプライアンス機能のソフトウェアラインセンスは、そのライセンスの対象であるロボットコントローラにて登録をしてください。例えば、Robot1(スレーブコントローラ)用のライセンスを購入された場合、Robot1のロボットコントローラにて登録してください。
- 力センサとの通信に使用するRS-422Aの通信設定は、RS-422A通信ボードまたは、RS-422Aマイクロコンバータを装着しているロボットコントローラにて登録してください。
ライセンス登録
各ロボットコントローラの中で、いずれかのロボットコントローラにライセンスが登録されていれば、すべての力センサを使用できます。
購入されたライセンスの対象であるロボットコントローラに、ティーチングペンダントもしくはミニペンダントを接続しライセンスの登録を行なってください。
例えば、Robot1(スレーブコントローラ)用のライセンスを購入された場合、Robot1のロボットコントローラにティーチングペンダントもしくはにミニペンダントを接続し、登録してください。
RS-422Aの通信設定
RS-422Aの通信設定の中で、FIFOバッファを有効にする操作は、RS-422A通信ボードまたは、RS-422Aマイクロコンバータを装着しているロボットコントローラにて行ってください。
例えば、Robot1(スレーブコントローラ)にRS-422A通信ボードが装着されているとします。その場合は、Robot1のロボットコントローラにティーチングペンダントもしくはにミニペンダントを接続し、FIFOバッファを有効にしてください。
FIFOバッファの設定方法は、"FIFOバッファを有効にする"を参照してください。
ロボットの選択
マスターコントローラに接続されているティーチングペンダントでの設定は、基本的にリーダに指定されているロボットに対して行われます。
したがって、スレーブコントローラに接続されている力センサの設定を行うには、そのスレーブコントローラのロボットをリーダに指定します。
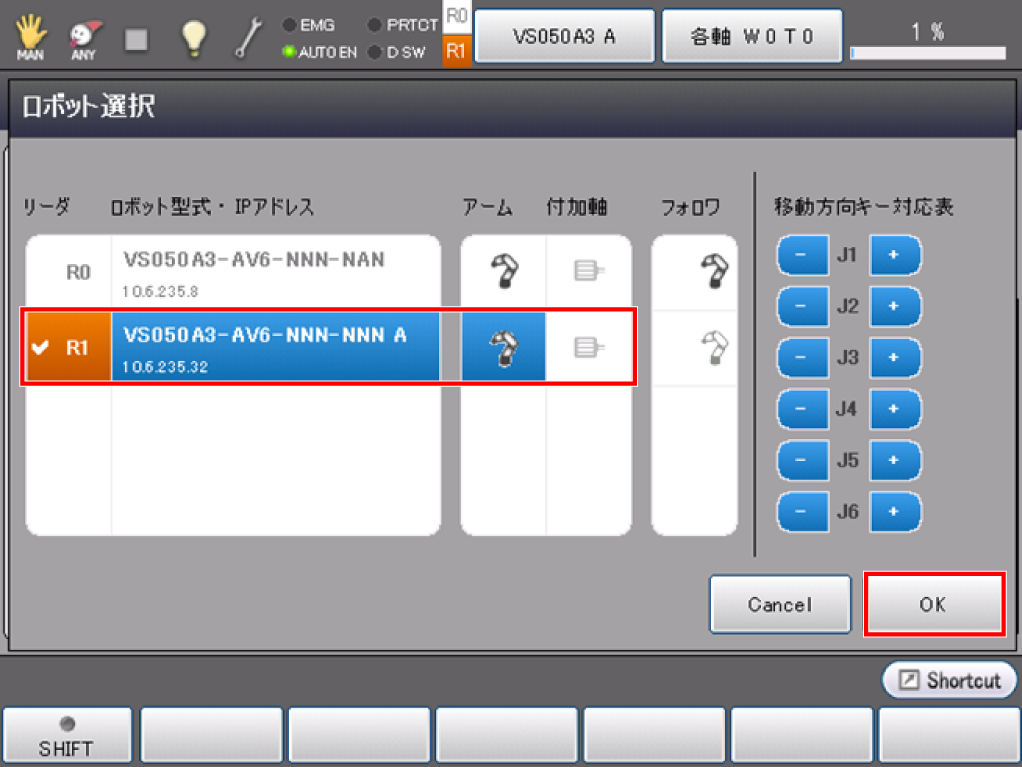
下記画面は2台のロボットを連動させるときのものです。
画面上部にある「ロボット選択」ボタンを押してロボット名「R1」を選択し「OK」を押すことで、Robot1をリーダにすることができます。
ロボット名と力センサとの関連付け
RS-422A通信ボードとRS-422Aマイクロコンバータのどちらを使うかによって、考え方が変わります。
下記の参照先をご覧ください。
その他の設定
"センサの設定"および"パラメータの設定"の内容を設定してください。
コマンドについて
ロボット名を、力制御のコマンドの前に付けて使用します。
例えば、Robot0の力センサのリセットを行う場合は
Robot0.ForceSensor 0と記述します。
ID : 3316
- このページに関連する情報
- RS-422A通信ボード使用時の関連付け
- RS-422Aマイクロコンバータ使用時の関連付け