
ID : 3106
RS-422A通信ボードの設定
ここでは、RS-422A通信ボードの設定方法を説明します。
設定手順
以下の手順で実施します。
- DIPスイッチを設定します
- ボードをコントローラに装着します
- ティーチングペンダントで設定を行います
DIPスイッチの設定
使用するチャネルのDIPスイッチを以下のように設定します。
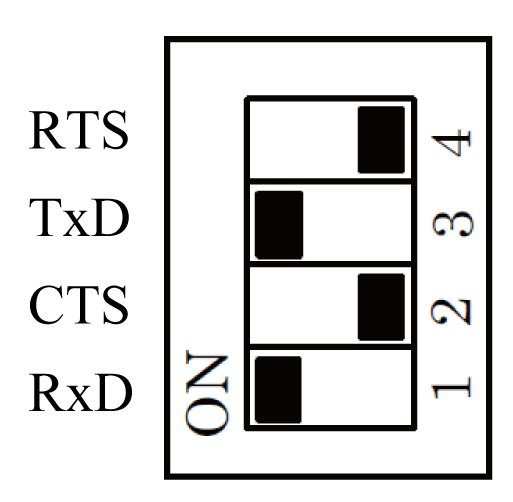
- データ伝送モードを「全二重でRTS、CTSを自己ループさせる」に設定します。
- ターミネータを「挿入する」に設定します。
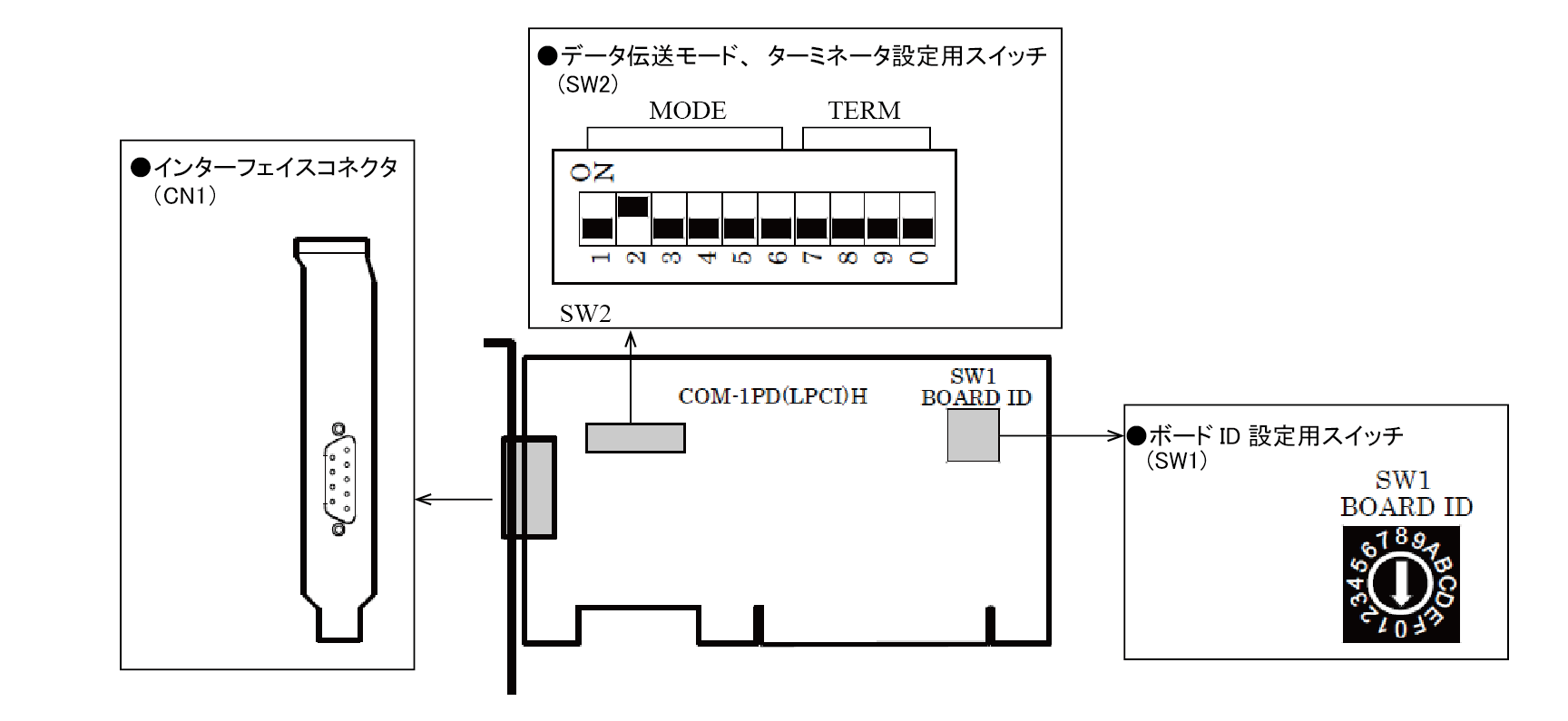
1チャネル品:COM-1PD(LPCI)Hの設定
DIPスイッチの位置
設定方法
| モード | 設定方法 |
|---|---|
・全二重
|
ビット1とビット2を同時にONにする設定にしないでください。ボードが故障する恐れがあります。 |
| ターミネータを挿入する | 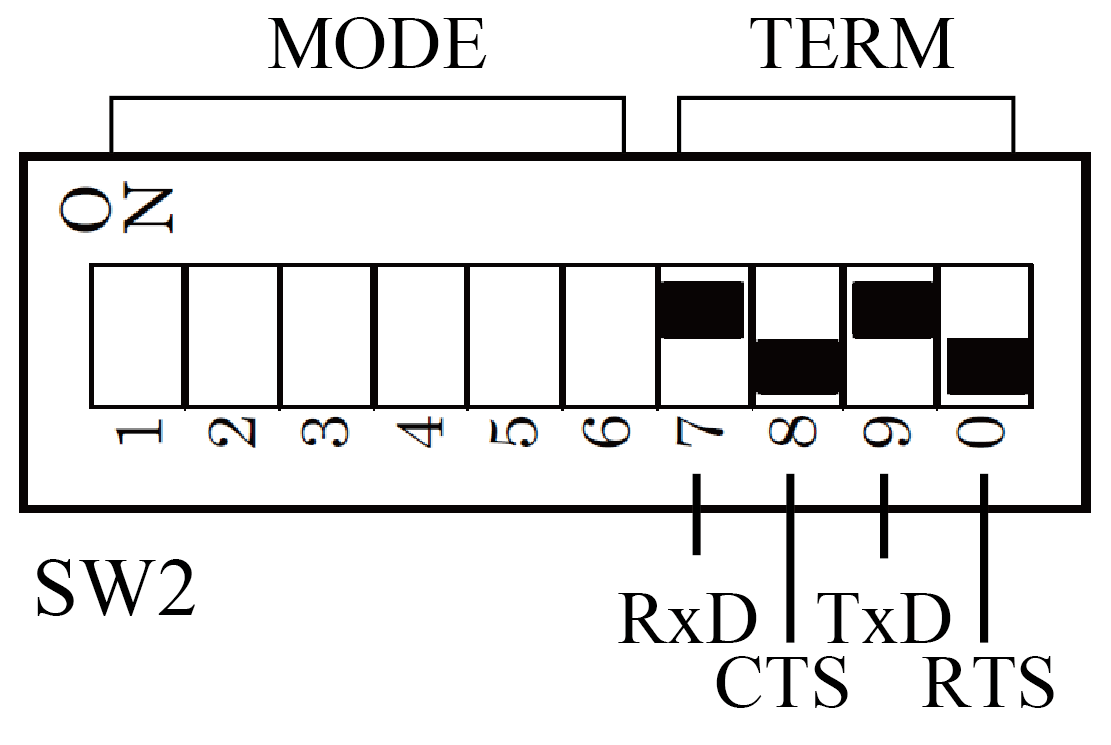 |
2チャネル品:COM-2PD(PCI)Hまたは4チャネル品:COM-4PD(PCI)Hの設定
どのチャネルも利用可能です。任意のチャネルをご利用ください。
DIPスイッチの位置
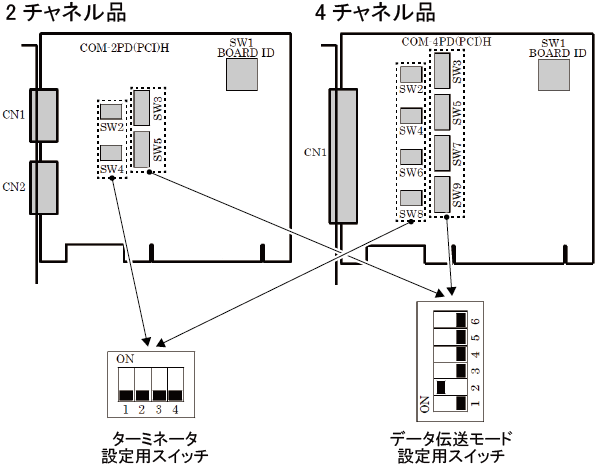
- 2チャネル品のスイッチ
-
ターミネータ
設定用スイッチデータ伝送モード
設定用スイッチチャネル SW2 SW3 CH1(CN1)用 SW4 SW5 CH2(CN2)用 - 4チャネル品のスイッチ
-
ターミネータ
設定用スイッチデータ伝送モード
設定用スイッチチャネル SW2 SW3 CH1用 SW4 SW5 CH2用 SW6 SW7 CH3用 SW8 SW9 CH4用
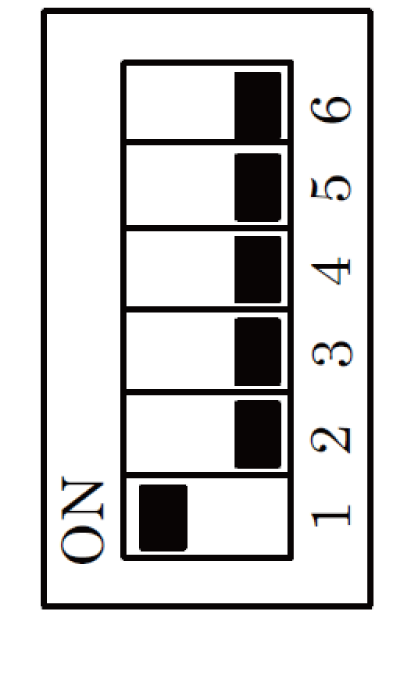
設定方法
力センサを接続するチャネルのDIPスイッチを設定します。
| モード | 設定方法 |
|---|---|
・全二重
|
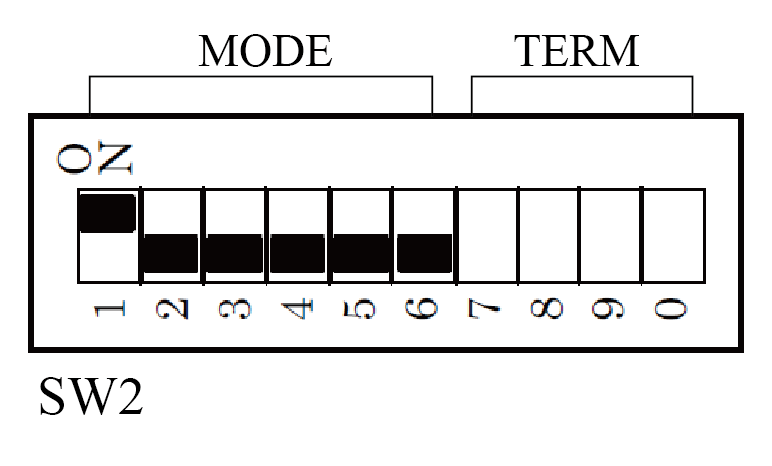
データ伝送モード設定用スイッチを下図のように設定します。
ビット1とビット2を同時にONにする設定にしないでください。ボードが故障する恐れがあります。 |
| ターミネータを挿入する | ターミネータ設定用スイッチを下図のように設定します。
|
ボードの装着
PCIスロットに推奨ボードを装着します。
装着方法については、RC8シリーズロボットコントローラ説明書の「増設ボードの取り付け」を参照してください。
ティーチングペンダントでの設定
ティーチングペンダントを使い、下記2つの設定を行います。
- FIFOバッファを有効にします
- 接続モードをRS-422Aにし、ポートを指定します
FIFOバッファを有効にする
操作経路:[F6 設定] - [F5 通信と起動権] - [F2 ネットワークと通信権]
デバイスの中から、力センサに接続する「RS-422A」のポートを選択します。
設定内容にあるFIFOバッファを選択し「編集」ボタンを押します。
[FIFOバッファ]ウィンドウが表示されるので、「使用」を選択し「OK」を押します。
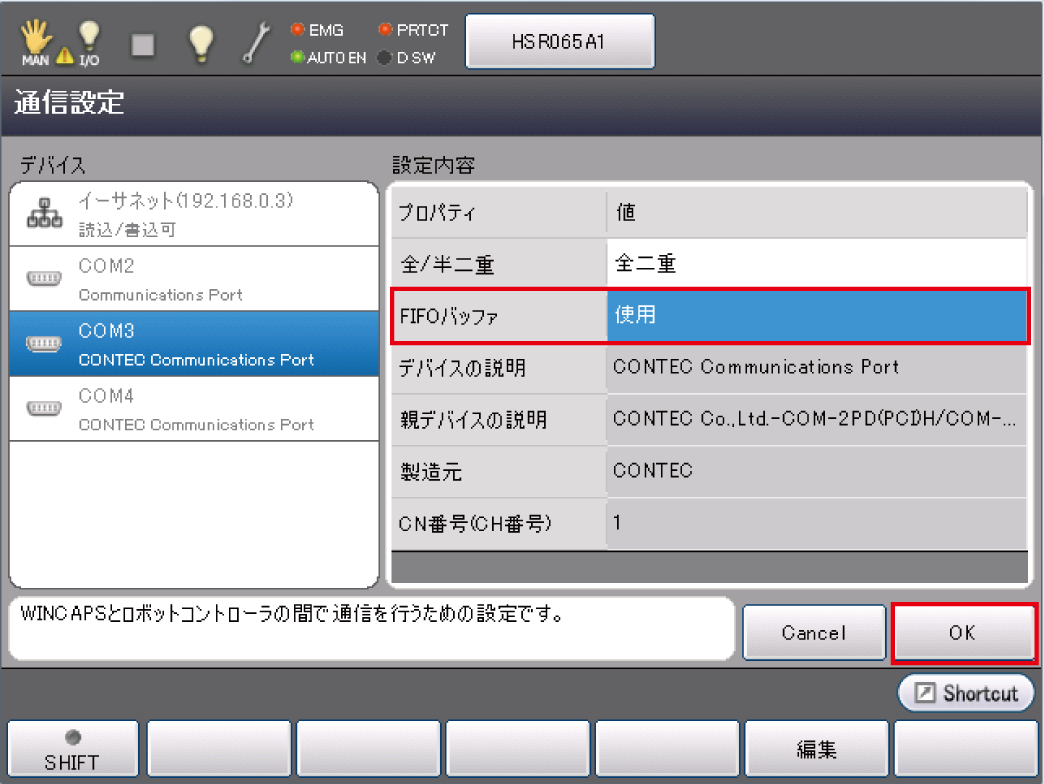
設定できたら「通信設定」画面で「OK」ボタンを押します。
「センサの設定」の「RS-422A通信の設定」でのクライアントポート番号は、ここで選択したCOM番号を入力します。
接続モードをRS-422Aにする
力センサの設定時に一緒に行います。
詳細については、「センサの設定」の「RS-422A通信の設定」を参照してください。
ID : 3106