
ID : 3317
RS-422Aマイクロコンバータの使用方法
RS-422Aマイクロコンバータの使用方法について下記の内容を説明します。
(この機器の使用可能なロボットコントローラのソフトウェアバージョンは2.5.*以上です。)
初期設定
以下の手順で実施します。
上記内容を実施後、実際に力センサとロボットコントローラを通信させたとき、ノイズの強い環境では、力センサとの通信に関するエラーが発生する場合があります。
その場合は、「RS-422Aマイクロコンバータ使用時のノイズ対策」を参照して、ノイズ対策を行ってください。
DIPスイッチの設定
RS-422AマイクロコンバータのDIPスイッチを以下のように設定します。
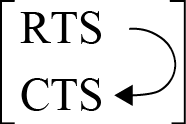
- データ伝送モードを「全二重でRTS、CTSを自己ループさせる」に設定します。
- ターミネータを「挿入する」に設定します。
DIPスイッチの位置
DIPスイッチには下図のように、フタで閉じられています。
マイナスドライバでフタを外し、DIPスイッチの設定を行った後、フタを閉じてください。

マイナスドライバの先が深く入ると内部を傷つけます。内部方向への力をかけないようにしてマイナスドライバを回転させてください。
DIPスイッチの設定内容
下図のように設定してください。

| モード | 設定方法 |
|---|---|
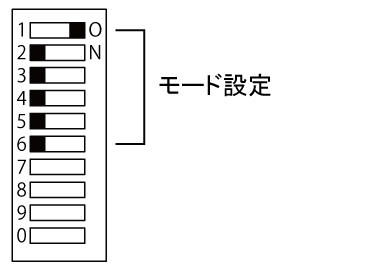
・全二重
|
データ伝送モード設定用スイッチを下図のように設定します。
ビット1とビット2を同時にONにする設定にしないでください。製品が故障する恐れがあります。 |
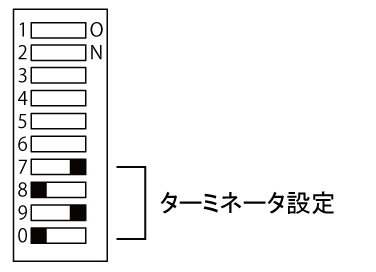
| ターミネータを挿入する | ターミネータ設定用スイッチを下図のように設定します。
|
USBコネクタへの接続
次の手順で行います。
- ロボットコントローラの電源を切ります。
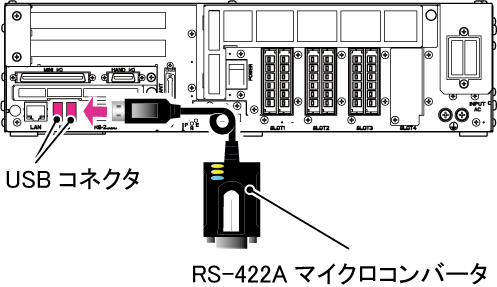
- RS-422Aマイクロコンバータを、ロボットコントローラのUSBコネクタに接続します。
RS-422Aマイクロコンバータをロボットコントローラに接続するのが初めての場合、ロボットコントローラの電源を入れた後にエラーメッセージウィンドウが表示されます。エラーの内容は、新規デバイスのドライバをインストールしたことを伝えるものです。
そのエラーメッセージウィンドウの[OK]ボタンを押すとロボットコントローラは自動的にシャットダウンを開始します。
シャットダウンが終了すると、下図のような画面が表示されますので、下図の画面が表示されたのを確認して、ロボットコントローラの電源を再投入してください。

上図の画面が表示される前に、ロボットコントローラの電源を切らないでください。
データが破損する恐れがあります。
ティーチングペンダントでの設定
ティーチングペンダントを使い、下記の設定を行います。
- FIFOバッファを有効にします(その際、Latency timerの設定値を確認します)。
- 接続モードをRS-422Aにし、ポートを指定します。
FIFOバッファを有効にする
下記の経路でティーチングペンダントを操作し、[通信設定]ウィンドウを表示させます。
| 操作経路:[F6 設定] - [F5 通信と起動権] - [F2 ネットワークと通信権] |
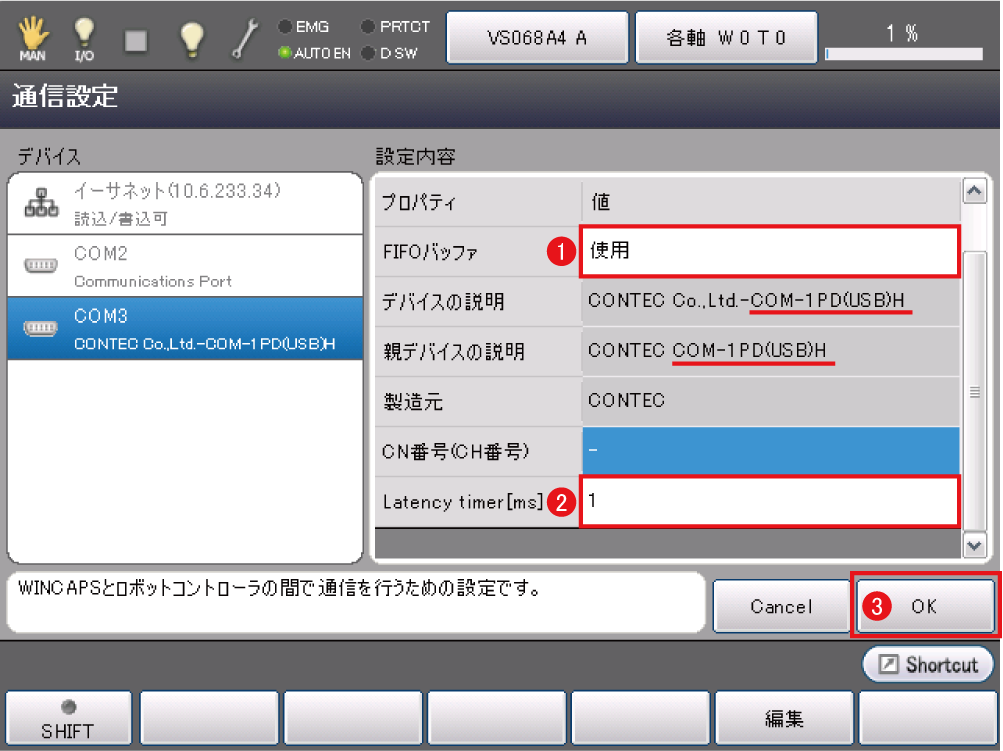
- デバイスの中から、力センサに接続する「RS-422A」のポートを選択します。
(RS-422Aマイクロコンバータは、"デバイスの説明"欄または"親デバイスの説明"欄に型式"COM-1PD(USB)H"が表示されます。)
設定内容にあるFIFOバッファを選択し「編集」ボタンを押します。
[FIFOバッファ]ウィンドウが表示されるので、「使用」を選択し「OK」を押します。 - 次に、Latency timer[ms]の設定値が"1"であることを確認します。
"1"になっていない場合は、"1"に設定してください。 - 設定できたら「通信設定」画面で「OK」ボタンを押します。
接続モードをRS-422Aにする
力センサの設定時に一緒に行います。
詳細については、「センサの設定」の「RS-422A通信の設定」を参照してください。
注意事項
信号線ケーブルのコネクタについているネジが、RS-422Aマイクロコンバータのコネクタについているナットに届かない場合があります。その場合は、結束バンドなどにて、コネクタが外れないように固定してください。

ID : 3317
- このページに関連する情報
- RS-422Aマイクロコンバータ使用時のノイズ対策