
ID : 5465
ハードウェアの準備
力センサ有コンプライアンス機能のシステムを構築するには、弊社のロボット製品以外に、力センサや力センサの接続ケーブルなどが必要です。
ここでは、弊社のロボット製品以外に必要な機器について説明します。
力センサ概要
株式会社ワコーテック製の静電容量型力センサDynPick(WEF-6Aシリーズ)の中で、以下のものが使用できます。
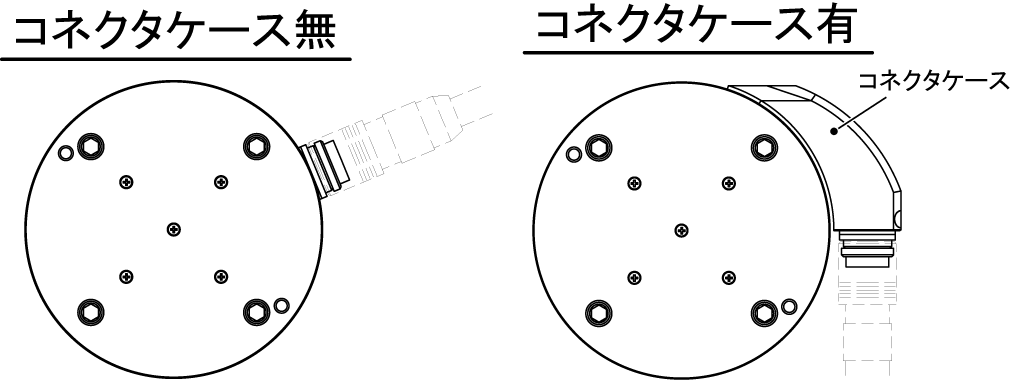
| 型式/外観 | コネクタケース(*1) | 定格荷重 | 取付寸法図 | |
|---|---|---|---|---|
| 並進力 [N] | モーメント [Nm] | |||
WEF-6A200-4-RCD
|
無し | ±200 | ±4 | 参照(PDF:165KB) |
WEF-6A200-4-RCD-B
|
有り | 参照(PDF:164KB) | ||
WEF-6A500-10-RCD-B
|
±500 | ±10 | ||
WEF-6A1000-30-RCD-B
|
±1000 | ±30 | 参照(PDF:167KB) | |
WEF-6A200-20-RCD-B
|
±200 | ±20 | 参照(PDF:228KB) | |
共通仕様
|
||||




*1 : コネクタケースが有ると、センサコネクタの接続方向をセンサ円周方向にすることができます。
*2 : 力センサの詳細は、「DynPick 静電容量型6軸力覚センサ WEF-6A シリーズ」の取扱説明書を参照してください。 取扱説明書は株式会社ワコーテックのホームページよりダウンロードできます。
力センサは定期的に点検してください。
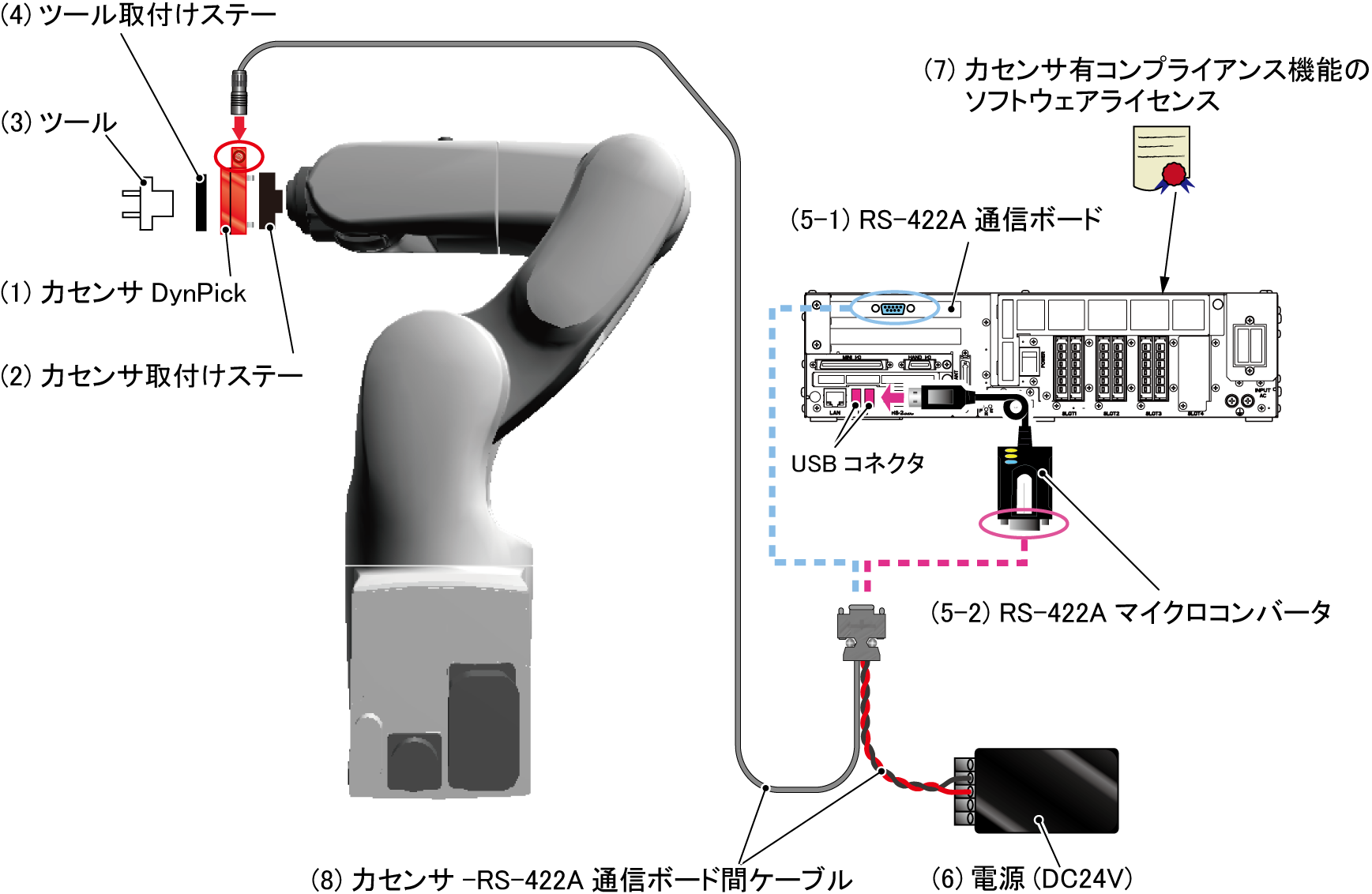
システム構成
下図にシステム構成を示します。
VSロボットの通信ケーブルフランジ仕様-Aの場合のみ、ロボットコントローラと力センサの配線に、ロボットの機内配線を使用することができます。
詳細は「機内配線を使用した配線」を参照してください。
構成品/ メーカ/型式(品番) |
内容 | ||||
|---|---|---|---|---|---|
(1)力センサ株式会社ワコーテック
|
静電容量型力センサDynPickです。 ご使用状況に合わせて選択してください。 |
||||
(2)力センサ取付けステーお客様で制作 |
力センサをロボット先端に取り付けるのに使用します。 詳細は「力センサの取付け方法」を参照して制作してください。 |
||||
(3)ツールお客様で選定 |
お客様の仕様に合わせて選択してください。 | ||||
(4)ツール取付けステーお客様で制作 |
力センサにツールを取り付けるのに使用します。 「力センサ概要」の取付寸法図を参照して制作してください。 |
||||
力センサとロボットコントローラを、RS-422A通信で通信させるための機器を、下記の2つから選択できます。
|
|||||
(6)電源(DC24V)お客様で選定 |
力センサに電力を供給するための電源装置です。力センサ-RS-422A通信ボード間ケーブルの赤黒2本のケーブルを接続します。
その他、詳細な情報は、「DynPick 静電容量型6軸力覚センサ WEF-6A シリーズ」の取扱説明書を参照してください。 取扱説明書は株式会社ワコーテックのホームページよりダウンロードできます。 赤(+24V)、黒(0V)の接続を間違えないように注意してください。間違えると力センサが破損する恐れがあります。 |
||||
(7)力センサ有コンプライアンス機能のソフトウェアライセンス株式会社デンソーウェーブ
|
こちらは弊社の製品です。 力センサ有コンプライアンス機能を使用するためのライセンスです。 "機能を有効にして出荷"は、ロボットセット出荷時にあらかじめ力センサ有コンプライアンス機能を有効にして出荷します。ロボットセットを注文する際にお申し付けください。 "ライセンスのみ"は、既にご購入済みのロボットセットにて、力センサ有コンプライアンス機能をご使用する場合にご注文ください。"ライセンスのみ"の場合は、お客様のロボットコントローラの力センサ有コンプライアンス機能を有効にする必要があります。 機能を有効にする手順については「力センサ有コンプライアンス機能の有効化」を参照してください。 |
||||
(8)力センサ-RS-422A通信ボード間ケーブル株式会社ワコーテック
|
RS-422A通信機器(RS-422A通信ボードまたはRS-422Aマイクロコンバータ)および24V直流安定化電源を、力センサに接続するケーブルです。 ご使用状況に合わせてケーブル長を選択してください。 |
||||
ID : 5465
- このページに関連する情報
- 力センサの取付方法
- RS-422A通信ボードの設定
- RS-422Aマイクロコンバータの使用方法
- 機内配線を使用した配線