
ID : 5469
パラメータの設定
パラメータ設定詳細を以下に示します。
- 力制御番号(コンプライアンス機能のパラメータテーブル番号)毎に、パラメータを設定します。制御モードの指定も力制御番号毎に行います。
- 必須項目のみで使用できない場合は、必要に応じて「その他のパラメータ」を設定してください。
- 項目名欄の[ ]内に記述されているのは、ForceParamの項目名です。
- 「力センサ」の「有」欄に○が付いているものは、「力センサ有コンプライアンス機能」で使用するパラメータです。
- 「力センサ」の「無」欄に○が付いているものは、力センサを使用しない「コンプライアンス機能」で使用するパラメータです。
- 大きな制御力や小さい慣性、粘性、バネ値を指定すると、ロボットは高速に動作します。高速動作中にワークと衝突すると、力センサやロボットが過大な力を受け、故障や破壊につながります。調整時には安全のため、最初はデフォルトのバネ・粘性・慣性の割合から少しずつ値を小さくするようにしてください。また、制御割合も最初は小さな値から徐々に大きくしていき、力制御をしたくない方向は0%にしてください。
- 定圧押付や勘合動作のときは、粘性パラメータの変更だけで調整できる初期値が入っています。粘性を大きくしていくと力制御開始時にエラーになる場合があります。その場合は、慣性パラメータの値を大きくして調整してください。
- 調整時は、「目標制御力」と「制御割合」を最初に設定してください。調整手順については、「調整手順」を参照してください。
必須項目
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F6 設定]
力制御番号(コンプライアンス機能のパラメータテーブル番号)1~10を指定し、[OK]ボタンを押します。
| 項目名 | 単位 | 範囲 | 力センサ | 詳細 | |
|---|---|---|---|---|---|
| 有 | 無 | ||||
| 制御モード | - | 0、1 | ○ | ○ | 制御モードを以下より選択します。 0:コンプライアンス機能 1:力センサ有コンプライアンス機能 |
| 力制限座標系選択 [座標系] |
- | 0、1、2 | ○ | ○ | 座標を以下より選択します。 0:ベース座標系 1:ツール座標系 2:ワーク座標系 |
| 目標制御力 [力] (X、Y、Z、RX、RY、RZ) |
N | -5000~5000 | ○ | ○ | ロボットを制御するための力で、設定した力以上は出力しません。 この値を小さくすると、小さな外力に倣って動作するようになります。 注:力センサを使用しない「コンプライアンス機能」を制御モードで選択した場合は、姿勢や動きによって制御力が変化しますので、実際の作業に合った力に設定してください。 |
| Nm | -1000~1000 | ||||
その他のパラメータ(必要に応じて)
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F12 詳細設定]
力制御番号(コンプライアンス機能のパラメータテーブル番号)1~10を指定し、[OK]ボタンを押します。
上記の「制御モード」の設定に合わせ、使用するパラメータのみ表示されます。
| 項目名 | 単位 | 範囲 | 力センサ | 詳細 | |
|---|---|---|---|---|---|
| 有 | 無 | ||||
| 仮想慣性 [Mass=慣性] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | ○ | 加速度に応じて増加する抵抗力の割合を設定します。 この値を小さく設定すると、速く移動させることが可能になります。 |
|
| 仮想粘性 [Damp=粘性] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | ○ | ○ | 速度に応じて増加する抵抗力の割合を設定します。 この値を小さく設定すると、速く移動させることが可能になります。 |
| 仮想バネ [Spring=柔らかさ] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | ○ | ○ | 位置に応じて増加する戻り力の強さの割合を設定します。 この値を小さく設定すると、弱い力でも大きく移動させることができます。 |
| 力オフセット設定 [OffSet=オフセット値] (X、Y、Z、RX、RY、RZ) |
N | -100~100 | ○ | あらかじめ倣わせたい方向に誘導するための力を設定します。 注:動作によっては、必ずしも狙った方向に誘導されるとは限りません。 |
|
| Nm | -100~100 | ||||
| 偏差許容値 [PosEralw=位置偏差値] (X、Y、Z、RX、RY、RZ) |
mm | 0~1000 | ○ | ○ | 手先位置の偏差許容値を設定します。 力センサ有コンプライアンス機能の場合は、力制御開始からの手先位置の移動量を監視しています。 |
| deg | 0~360 | ||||
| 軸偏差許容値 [Eralw=各軸偏差許容] (J1~J8) |
deg | 0~1000 | ○ | ○ | 各軸の偏差許容値を設定します。 力センサ有コンプライアンス機能の場合は、力制御開始からの各軸の移動量を監視しています。 ただし、付加軸は設定しても無効です。 |
| 軸電流制限値 [CurLmt=電流制限値] (J1~J8) |
% | 0~100 | ○ | 各軸モータのトルク値(電流値)を設定します。 100[%]が定格で、この値を小さくするとトルク値(電流値)が下がり、抵抗力が弱くなります。 ただし、付加軸は設定しても無効です。 |
|
| 制御割合 [Rate=制御割合] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | ○ | 力センサ有コンプライアンス機能でどれくらいの割合で制御するか決めます。 通常、力制御したい方向は制御割合を100%にしてください。力制御したくない方向は制御割合を0%にしてください。 |
|
| 最大並進速度 [SpMax=最大並進速度] |
mm/s | 0~10000 | ○ | 接触前までの最大速度を決定します。 | |
| 最大回転速度 [RSpMax=最大回転速度] |
deg/s | 0~10000 | ○ | 接触前までの最大回転速度を決定します。 | |
メンテナでのみ設定可能なパラメータ
メンテナの場合は、上表の項目に追加して、下表の項目の設定もできます。
| 項目名 | 単位 | 範囲 | 力センサ | 詳細 | |
|---|---|---|---|---|---|
| 有 | 無 | ||||
| 特殊制御モード | - | 0、8 | ○ | 力制御中の特別な制御条件を設定します。 0:無効 8:速度制限再開 |
|
| 仮想慣性 (X、Y、Z、RX、RY、RZ) |
N、kgcmˆ2 | - | ○ | 上記の「仮想慣性」のベースとなる値を設定します。ここの値が上記で100%を指定したときの値になります。 | |
| 仮想粘性 (X、Y、Z、RX、RY、RZ) |
Ns/m、Ncms/rad | - | ○ | 上記の「仮想粘性」のベースとなる値を設定します。ここの値が上記で100%を指定したときの値になります。 | |
| 仮想バネ (X、Y、Z、RX、RY、RZ) |
N/m、Ncm/rad | - | ○ | 上記の「仮想バネ」のベースとなる値を設定します。ここの値が上記で100%を指定したときの値になります。 | |
WINCAPSIIIでのみ設定可能なパラメータ
下表の項目は、WINCAPSIIIでのみ設定ができます。
| 項目名 | 単位 | 範囲 | 力センサ | 詳細 | |
|---|---|---|---|---|---|
| 有 | 無 | ||||
| 位相進め時間 (X、Y、Z、RX、RY、RZ) |
sec | 0~ | ○ | 位相進め時間を設定します。 振動的になる場合は、このパラメータの値を初期値から少しずつ大きくしてください。 値を大きくしすぎて振動が大きくなった場合は、値を小さくしてください。 |
|
速度制限について
力センサ有コンプライアンス機能では、物体との最初の接触時の力を軽減するため、力制御開始時に速度制限をかけています。物体に接触すると速度制限は解除され、以後は速度制限がない状態で力制御を行います。
速度制限中のロボットの動作速度は、"最大並進速度"または"最大回転速度"の設定値以下に抑えられます。
"最大並進速度"および"最大回転速度"は、上記の"その他のパラメータ"の中にあります。
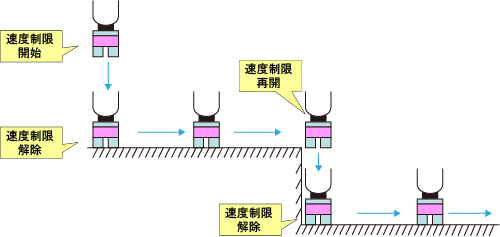
速度制限再開について
パラメータ「特殊制御モード」を「速度制限再開」に設定した場合は、いったん物体から離れると、速度制限を再開します。
下図のような、力制御中にいったん物体から離れ、再度物体との接触があるような工程の場合、物体との再接触時の力を軽減することができます。
ID : 5469