
ID : 2161
調整手順
下記の手順で実施します。
- 制御力、制御割合を最初に設定します。
- 仮想粘性(Damper)を徐々に小さくし、調整します。
- 仮想慣性(Mass)、仮想バネ(Spring)は、基本的には変更不要です。
- パラメータ調整は、ティーチングペンダントでもコマンドでもできます。併用すると、混乱により誤った設定を行う恐れがありますので、どちらかに統一して実施することをお勧めします。
- 制御したい方向と、Move命令などでのロボット動作命令の動作方向が一致している場合は、指定した力通りに制御はできませんので、制御を開始したい位置まで移動したら、MotionSkipでロボット動作命令をスキップさせてください。
(1)制御力、制御割合の設定
ティーチングペンダントまたはコマンドで制御力、制御割合を設定します。
| パラメータ | 設定値 |
|---|---|
| 目標制御力 | 目標の力/モーメントを設定 |
| 制御割合 | 対象の方向を100%。それ以外は0%に設定 |
ティーチングペンダントで実施する場合
操作方法については、「パラメータの設定」を参照してください。
コマンドで実施する場合
ForceParamコマンドを使用します。
(例)テーブル番号1でツール座標系でZ方向に30Nで押し付け動作をする場合
ForceParam 1, 1, P(0,0,30,0,0,0), Rate=P(0,0,100,0,0,0)(2)仮想粘性(Damper)を徐々に小さくしながら調整
振幅と収束時間が理想となる仮想粘性を、現物にて調整します。実際に動作させ、力制御ログのグラフで確認します。
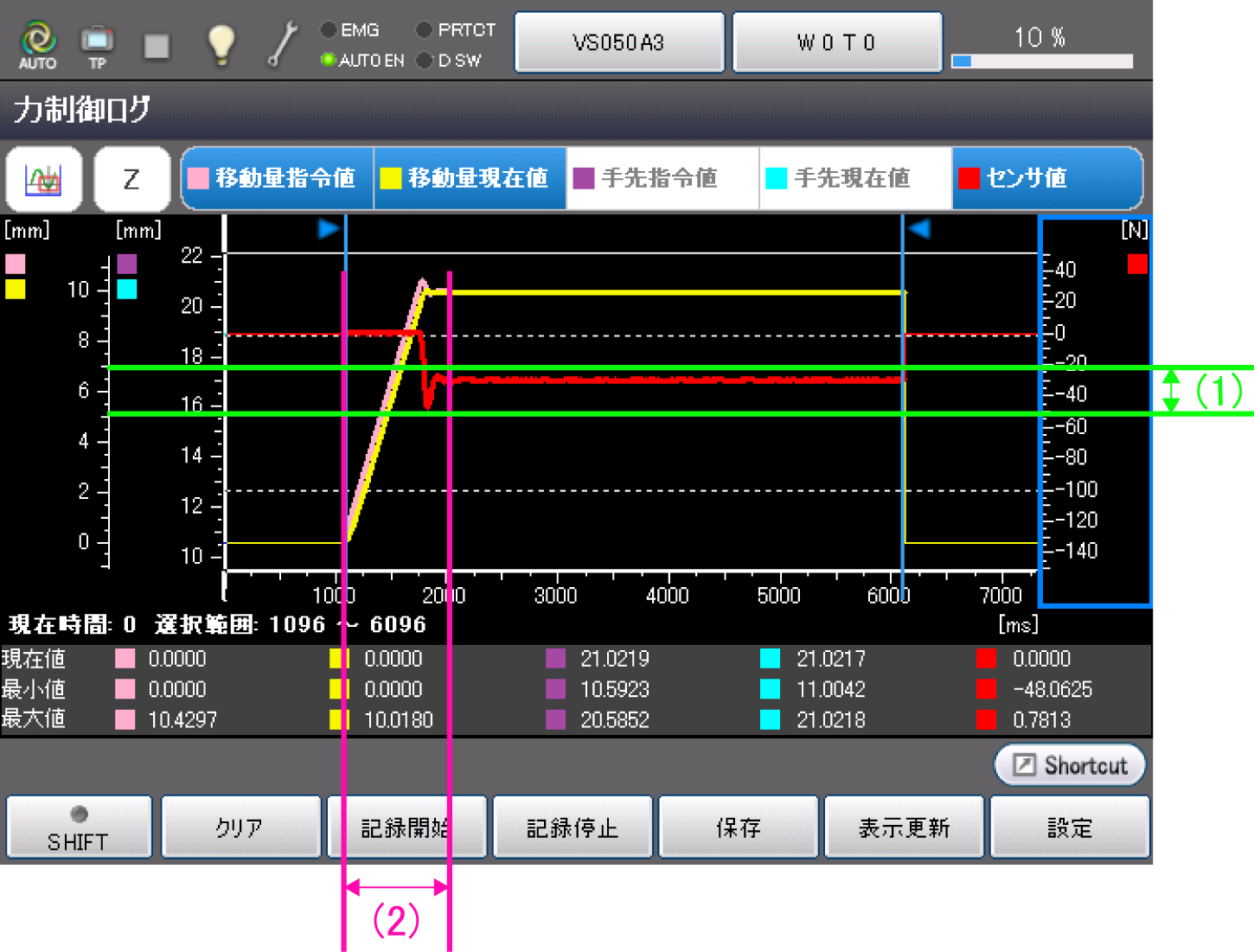
| 番号 | 確認項目 |
|---|---|
| (1) | 振幅が希望した目標値±許容値通りになっているか |
| (2) | 希望した時間以内に収束しているか |
力制御ログについては、「力制御ログの取得・表示・保存」を参照してください。
振動、動作速度の変化
仮想粘性を操作すると、振動、動作速度は下表のように変化します。
| 仮想粘性 | 振動 | 動作速度 |
|---|---|---|
| 大きくする | 減少 | 減少 |
| 小さくする | 増加 | 増加 |
| 仮想粘性 | 状態 |
|---|---|
| 100% | 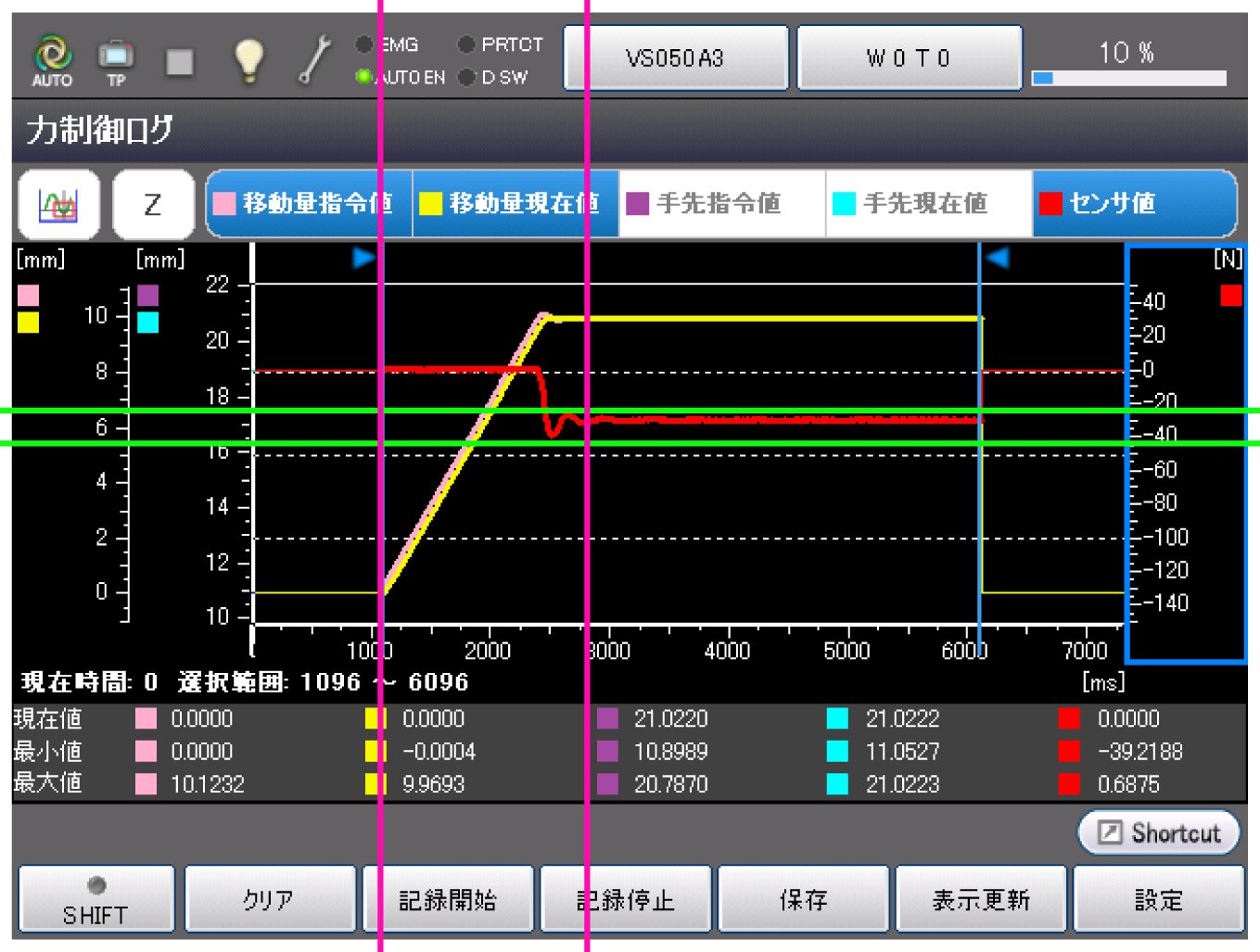 |
| 50% | 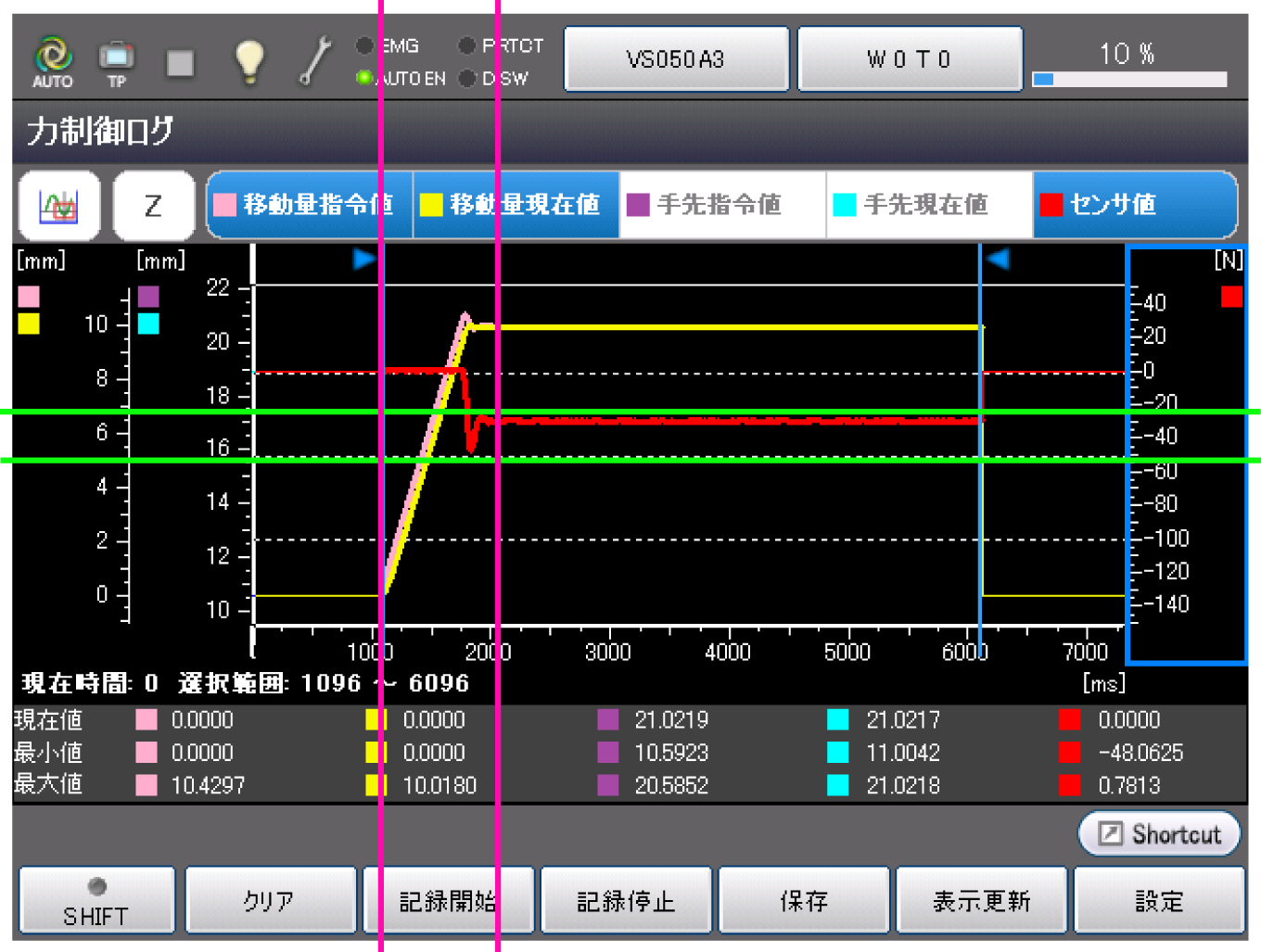 |
| 30% | 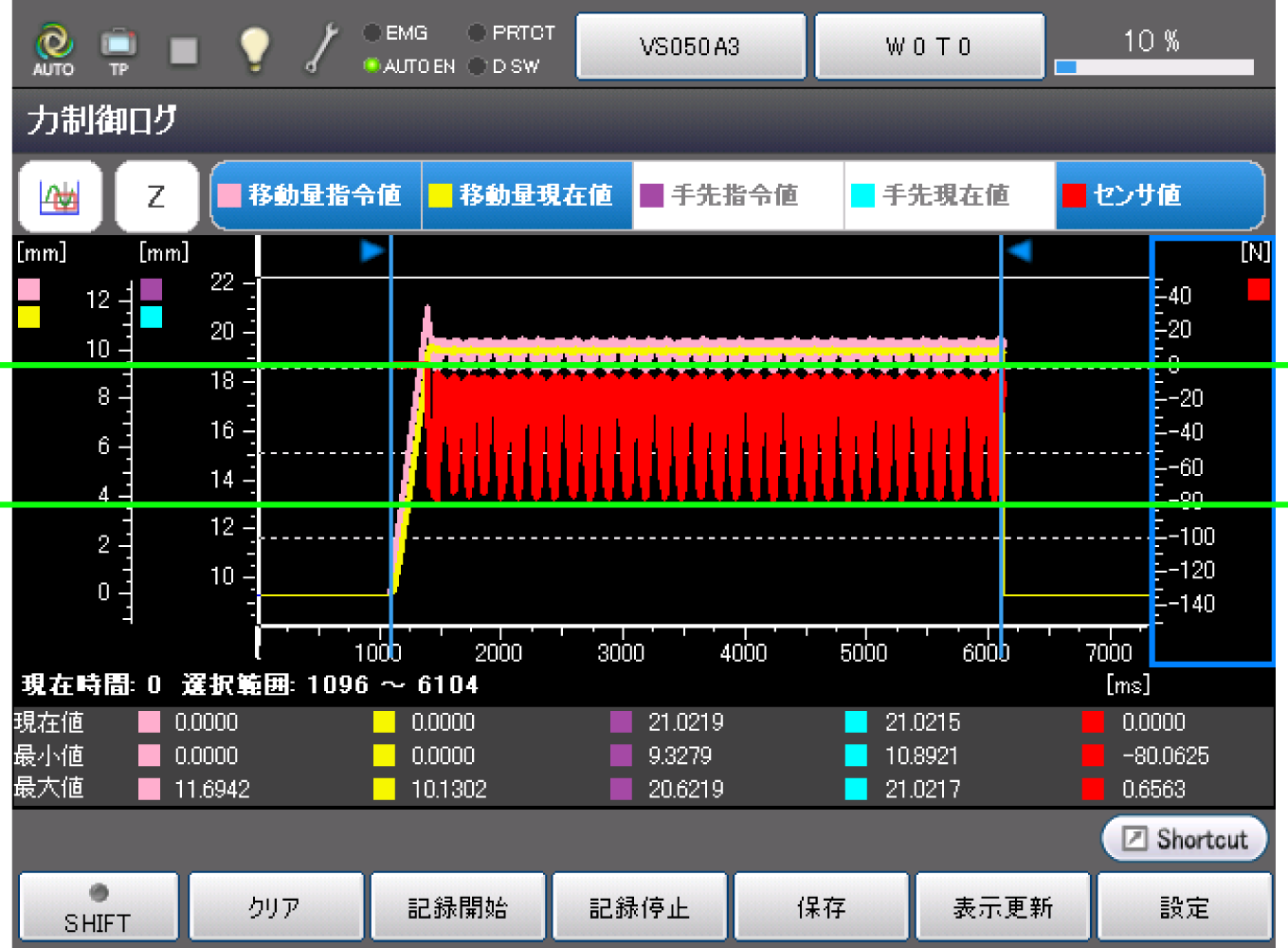 |
調整時の注意
- 基本は仮想粘性を操作し、仮想慣性や仮想バネはそのままの値で調整してください。
- 仮想バネの値を入れると、目標値通りに押付け動作はできなくなるので、注意してください。
- 振動するような仮想粘性を設定した場合は、力制御できていないので、それ以下の仮想粘性は設定しないでください。
ID : 2161