
ID : 5908
力制御ログ設定の表示・変更
操作経路:[F2 アーム] - [F2 力制御] - [F2 力制御ログ] - [F6 設定]
力制御ログ取得にかかわる設定の表示・変更を行います。
力制御ログの[F6 設定]を押すと、次のような[力制御ログ設定]ウィンドウが表示されます。
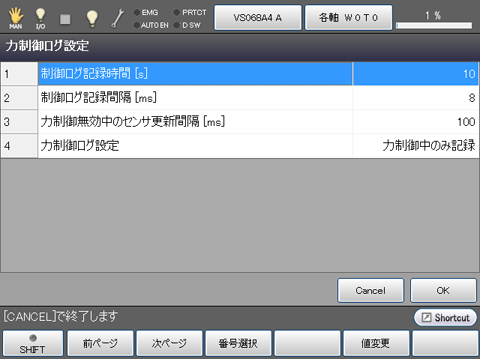
| パラメータ | 単位 | 初期値 | 内容 |
|---|---|---|---|
| 制御ログ記録時間 | s | 10 | 制御ログを記録する時間の長さを設定します。 |
| 制御ログ記録間隔 | ms | 8 | 制御ログの記録間隔を設定します。 |
| 力制御無効中のセンサ更新間隔 | ms | 100 | 力制御無効中のセンサデータの更新間隔を指定します。「力制御ログ設定」で「常時記録」を指定した場合に有効です。 「制御ログ記録間隔」の設定値より小さい値を設定した場合でも、記録は「制御ログ記録間隔」の設定値で行います。 小さい値を設定すると、CPUに負荷がかかり、ロボットの動作に影響を及ぼす場合があります。 |
| 力制御ログ設定 | - | 力制御中のみ記録 | 力制御ログの記録を、力制御中だけにするか、常時行うかを設定します。 |
| 使用可能なファンクションキー | |
|---|---|
| [F1 前ページ] | 現在表示されている力制御ログ設定リストの直前のページが表示されます。 |
| [F2 次ページ] | 現在表示されている力制御ログ設定リストの直後のページが表示されます。 |
| [F3 番号選択] | テンキーが表示されますので、テンキーを使用して番号を入力し、[OK]を押すと、目的の番号が表示されます。 |
| [F5 値変更] |
変更したい項目を選択し、[値変更]を押すと、テンキーまたは入力画面が表示されます。 |
ID : 5908