
ID : 5592
力制御ログの取得・表示・保存
各軸の移動指令値、移動現在値、手先指令値、手先現在値、センサ値のログを取得しグラフで表示します。
力制御ログを利用した調整手順については、「調整手順」を参照してください。
WINCAPSIIIでは制御ログ受信時に、力制御ログも合わせて受信されます。受信した力制御ログは、WINCAPSIIIの[ファイル] - [エクスポート] メニューからCSV形式のファイルとして出力することができます。
力制御ログの表示
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F2 力制御ログ]
グラフが太くなっている部分は、力制御が作動している箇所です。
左上のアイコンをタッチするとプルダウンメニューが表示され、グラフの操作モードを変更できます。グラフの操作モードは以下の4種類になります。
| 操作モード | 説明 | 左右キー or ジョグダイアル |
上下キー or 上下キー + ジョグダイアル | 画面タッチ |
|---|---|---|---|---|
 表示位置を移動 |
グラフ軸の表示位置が移動します。 | X軸の表示位置が移動します。ジョグダイアルを使用すると移動量が小さくなります。 | 選択されたY軸の表示位置が移動します。上下キー + ジョグダイアルを使用すると移動量が小さくなります。 | X軸の表示位置が移動します。 |
 表示スケールを変更 |
グラフ軸の表示範囲が増減します。 | X軸の表示範囲が増減します。ジョグダイアルを使用すると増減量が小さくなります。 | 選択されたY軸の表示範囲が増減します。上下キー + ジョグダイアルを使用すると増減量が小さくなります。 | X軸の表示位置が移動します。 |
 選択範囲を変更 |
詳しくは下記を参照してください。 | X軸の選択範囲カーソルが移動します。ジョグダイアルを使用すると移動量が小さくなります。 | 使用しません。 | X軸の選択範囲カーソルがタッチした場所へ移動します。 |
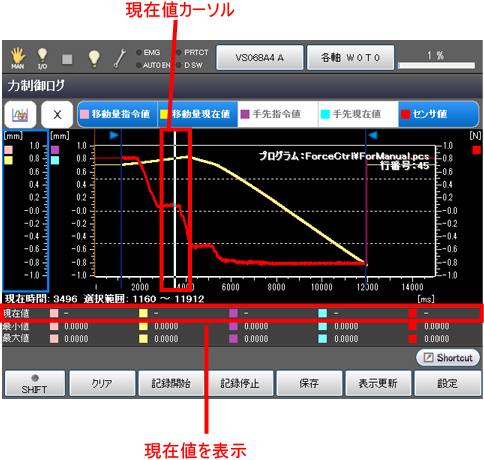
 現在値を見る |
選択した位置の値を表示します。選択した位置がロボット動作命令を実行した場所の場合は、グラフの右上に「プログラム」、「行番号」が表示されます。 | 現在値のカーソルが移動します。ジョグダイアルを使用すると移動量が小さくなります。 | 使用しません。 | 現在値のカーソルがタッチした場所へ移動します。 |
| ファンクションキー以外のキー | |
|---|---|
|
|
ボタンを押すと、プルダウンメニューが表示されます。 X、Y、Z、Rx、Ry、Rzの各軸データが表示可能です。 |
| 移動量指令値 |
移動量指令値情報を表示します。 |
| 移動量現在値 | 移動量現在値情報を表示します。 座標系は力制御座標系です。 選択すると黄色のグラフが表示されます。 |
| 手先指令値 |
手先指令値情報を表示します。 |
| 手先現在値 |
手先現在値情報を表示します。 |
| センサ値 |
センサ値情報を表示します。 |

| 使用可能なファンクションキー | |
|---|---|
| [F1 クリア] | 取得した力制御ログ情報を消去します。 |
| [F2 記録開始] | 力制御ログの取得を開始します。 |
| [F3 記録停止] | 力制御ログの取得を終了します。 |
| [F4 保存] | 取得した力制御ログ情報を保存します。 |
| [F5 表示更新] | ティーチングペンダントの力制御ログ表示画面を最新の情報に更新します。 |
| [F6 設定] | [力御ログ設定]ウィンドウが表示されます。 力制御ログにかかわる設定の確認・変更ができます。 |
| [F7 Y軸表示方向切替] | グラフのY軸目盛の表示形式を縦/横に変更します。 Y軸目盛を縦にすることでグラフの表示領域を広くできます。 |
| [F8 表示範囲変更] | X/Y軸の表示範囲を変更します。 [F8 表示範囲変更]を押すと「表示範囲変更」ウィンドウが表示されるので表示範囲の変更方法を以下から選択します。
|
力制御ログやセンサ値のモニタ画面で表示されている値は、補正後の値のため、実際の力センサが検出した値と一致しないことがあります。そのため、実際には検出値が指定した値を超えていなくても、画面には超えた値が表示される場合があります。また逆に、実際には検出値が指定した値を超えていても、画面には超えていない値が表示される場合があります。
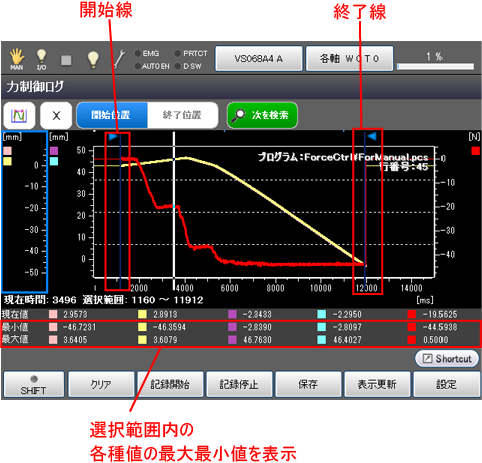
選択範囲を変更
| キー | 機能 |
|---|---|
| 開始位置 | 開始位置の設定が可能になります。 |
| 終了位置 | 終了位置の設定が可能になります。 |
| 次を検索 | 次に力制御が開始された箇所へジャンプします。 |
サンプルプログラム
力制御を開始する前にログの取得を開始します。力制御を終了したらログの取得を終了します。
Sub Main
TakeArm Keep = 0
Motor On
'初期位置
Move L, P4+(0,0,10)
SysLog.Ctrl.Clear
SysLog.Ctrl.Start
'現在値をゼロ点(0N|0Nm)にする
ForceSensor 0
Delay 1000
'テーブル番号1の設定でインピーダンス制御を有効にする
ForceParam 1,1,P(0,0,30,0,0,0),Damp = P(100,100,100,100,100,100),SPMax = 100
'力制御を開始する
ForceCtrl True, 1
'条件成立まで待機する
ForceWaitCondition Force = P(0,0,5)
'制御パラメータを動的に変更する
ForceParam 1,1,P(0,0,10,0,0,0), Damp = P(100,100,100,100,100,100), SPMax = 100
'Rz周りに回転
Drive (6,45), Speed = 20, Next
Delay 10000
'力制御を終了する
ForceCtrl False
'動作終了
Move P, P4+(0,0,10)
SysLog.Ctrl.Stop
End Sub
ID : 5592
- このページに関連する情報
- 力制御ログ設定の表示・変更