
ID : 5467
ロボットコントローラとの通信設定
ロボットコントローラと力センサをEtherNet通信する際は、ロボットコントローラがサーバとなり、力センサがクライアントとなります。ロボットコントローラのIPアドレス設定で設定します。
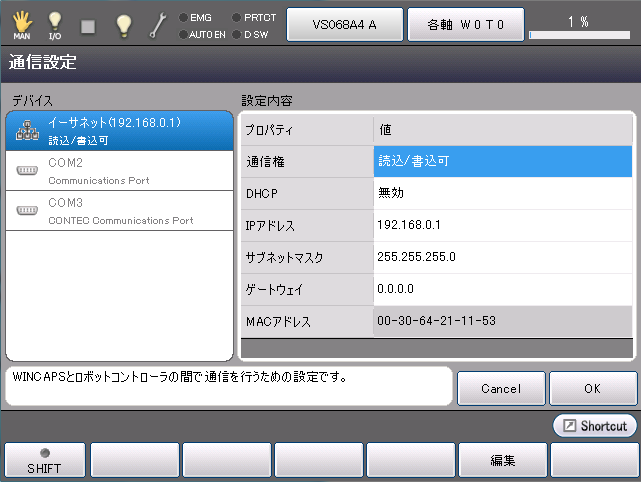
コントローラIPアドレス設定
操作経路:基本画面 - [F6 設定] - [F5 通信と起動権] - [F2 ネットワークと通信権]
ロボットコントローラと力センサが、同一のサブネットマスク内になるようにIPアドレス及び、サブネットマスクを設定してください。
力センサのIPアドレス設定方法
力センサと接続しているときは、以下の方法で力センサ自身のIPアドレスを変更します。ペンダント以外での力センサのIPアドレスの変更は、力センサの取扱説明書を参照してください。
1
基本画面-[F2 アーム]-[F2 力制御]-[F5 センサ]を押します。
「センサ」画面が表示されますので、[F2 IPアドレス設定]を押します。
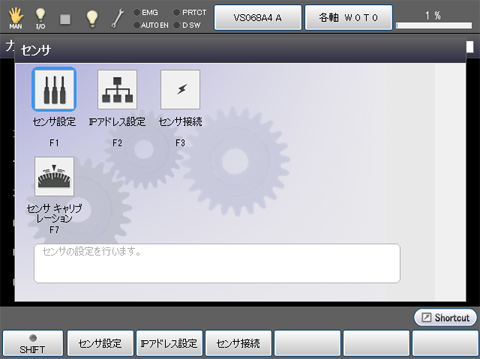
2
力センサのIPアドレスを入力し[OK]ボタンを押します。
力センサのIPアドレスは、力センサの取扱説明書を参照してください。

IPアドレス及びポート番号の確認
[F1 センサ設定]を押すと「センサ設定」画面が表示されます。
IPアドレスとポート番号が確認できます。
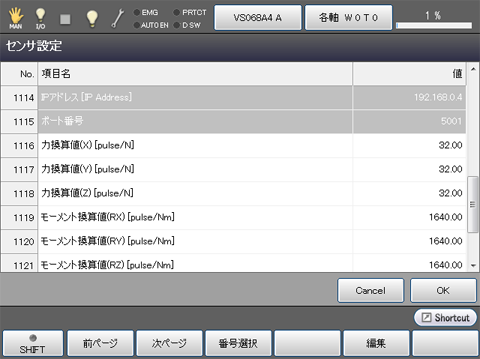
「センサ設定」画面では、IPアドレスとポート番号の編集はできません。
力センサの再接続
ロボットコントローラと力センサの接続が切れた場合は、「センサ」画面で[F3 センサ接続]ボタンを押します。
ID : 5467