
ID : 3339
RS-422Aマイクロコンバータ使用時の関連付け
協調機能で力センサを使用する際は、下図のような構成が考えられます。
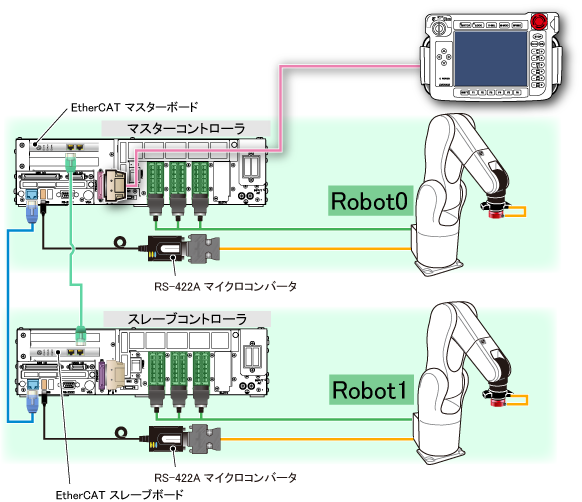
協調機能で力センサを使用するには、各ロボットに取付けられている力センサが、どのロボットコントローラに接続されているかを明示的に設定する必要があります。
上図の状況を整理すると、以下のようになります。
| 状況1 | Robot0に取付けられている力センサは、RS-422Aマイクロコンバータを介して、Robot0コントローラに接続されている。 |
|---|---|
| 状況2 | Robot1に取付けられている力センサは、RS-422Aマイクロコンバータを介して、Robot1コントローラに接続されている。 |
|
|
状況1は、Robot0に取付けられている力センサについてのことなので、Robot0のパラメータを設定します。
Robot0のパラメータ設定は、Robot0をリーダに指定することで行えます。
以下に状況1の設定方法を説明します。
1
Robot0をリーダに指定します。
2
ユーザレベルを「メンテナ」にして、次の操作経路で操作すると、下図の[接続設定]ウィンドウが表示されます。
| 操作経路 : [F2 アーム]-[F2 力制御]-[F5 センサ]-[F8 接続設定]-[F5 編集] |
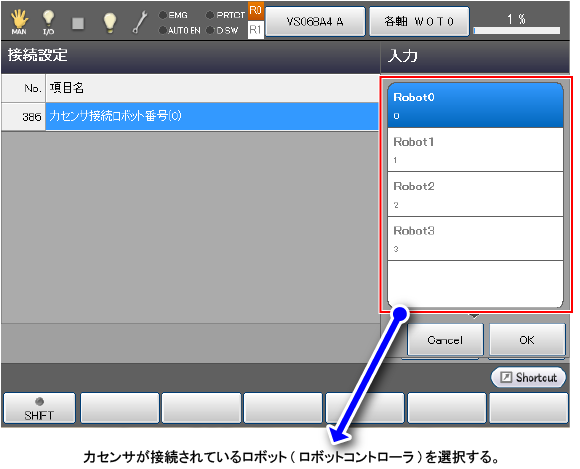
このウィンドウで、Robot0の力センサが、どのロボット(ロボットコントローラ)に接続されているかを設定します。
状況1では、Robot0の力センサは、Robot0コントローラに接続されているので、"Robot0"を選択して[OK]ボタンを押します。
3
[接続設定]ウィンドウを閉じ、[センサ]ウィンドウで、[F1 センサ設定]を押すと、下図のような[センサ設定]ウィンドウが表示されます。
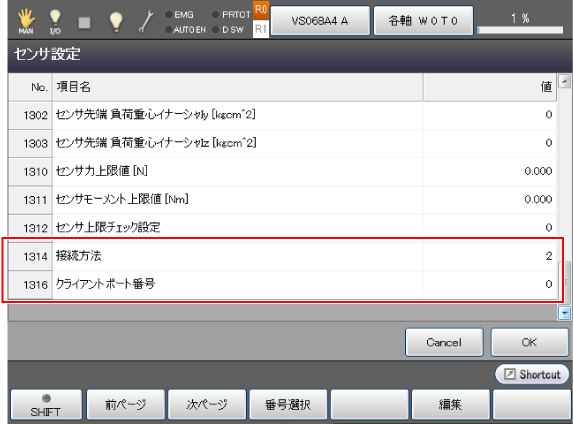
このウィンドウの中の、次の項目を設定します。
- "1314:接続方法"を"2:RS422"に設定します。
- "1316:クライアントポート番号"をRobot0コントローラに接続されているRS-422AマイクロコンバータのCOM番号に設定します。
Robot0コントローラに接続されているRS-422AマイクロコンバータのCOM番号については、次のウィンドウで確認できます。
| 操作経路 : [F6 設定]-[F5 通信と起動権]-[F2 ネットワークと通信権] |
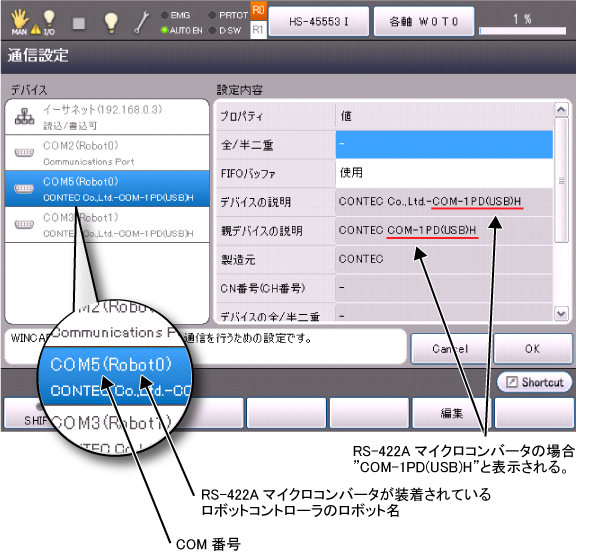
このウィンドウでは、全ロボットコントローラのポート内容を確認できます。
Robot0コントローラに接続されているRS-422AマイクロコンバータのCOM番号は、上のウィンドウから、"5"であることがわかります。
以上で、状況1の設定は終了です。
設定は、すべての力センサに対して必要です。
したがって、このシステム構成の場合、状況2についても設定が必要です。Robot1をリーダに指定し、同じように設定を行います。
ID : 3339