
ID : 441
Move C
機能
円弧を描きながらロボットを指定座標へ移動します。
構文
Move C, 経由位置, 目標位置[, 動作オプション]
指定項目
解説
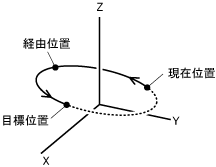
現在位置、経由位置、目標位置の3点で描かれる円弧に沿いながらロボットが経由位置、目標位置の順に移動します。
注意事項
姿勢は現在位置の姿勢から目標位置の姿勢に動作します。経由位置の姿勢要素は無視されます。現在位置と目標位置の形態が異なる場合はエラーが発生することがあります。
用例
'!TITLE "指定座標への移動"
' 目標座標位置へ円弧を描きながらの移動
Sub Sample_MoveC
Dim aaa As Position
Dim bbb As Position
Dim ccc As Position
TakeArm Keep = 1
' 動作開始位置の取得
aaa = P( 300, 100, 400, 180, 0, 180, -1 )
' 動作開始位置aaaへ移動
Move P, aaa
' 経由位置の取得
bbb = P( 600, 50, 400, 180, 0, 180, -1 )
' 目的位置の取得
ccc = P( 300, -200, 400, 180, 0, 180, -1 )
' 動作開始位置aaaからbbbを通り、cccへ円弧を描きながら移動
Move C, bbb, @P ccc
End SubID : 441