
ID : 210
RotateH
機能
アプローチベクトルを軸とした、回転動作をします。
構文
RotateH 回転角 [, 動作オプション]
指定項目
解説
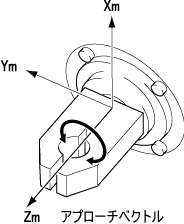
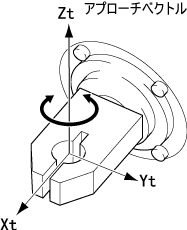
アプローチベクトルを軸とした、相対回転運動をします。アプローチベクトルの向きは、ツール座標の定義によって自由に変えることができます。下図に例を示します。
このステートメントを実行するにはタスクがロボット軸の制御権を取得しなければなりません。
TOOL0(メカニカルインタフェース座標系) |
TOOL定義でベクトル方向の変更と原点をオフセット |
関連項目
注意事項
-
用例
'!TITLE "アプローチベクトルを軸とした、回転動作"
' 動作命令後に、パス動作で動作し、相対回転角30度で回転
Sub Sample_RotateH
Dim aaa As Position
TakeArm Keep = 1
aaa = P( 400, 300, 400, 180, 0, 180, -1 )
' 現在位置からaaaの座標位置へ移動
Move P, aaa
' TOOL番号1を設定
ChangeTool 1
' パス動作で動き、相対回転角を30度回転
RotateH @P 30
' TOOL番号0を設定
ChangeTool 0
End SubID : 210