
ID : 1942
べース座標系との動作の違い
ロボットを手動操作するとき、動作モードに「TOOL0」を選ぶと、メカニカルインタフェース座標系で動作します。「X-Y」モードを選ぶと、ベース座標系で動作します。
手動モードでの[X]、[Y]、[Z]キー操作
下図は、[X]、[Y]、[Z]キー操作による、2つの座標系での動作の違いを示します。
| X-Yモード(ベース座標系) | TOOLモード(メカニカルインタフェース座標系) | ||
|---|---|---|---|
| X± | 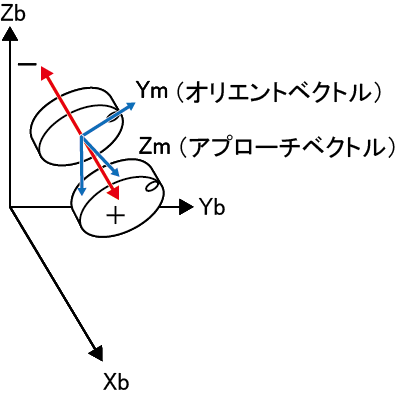 |
X± | 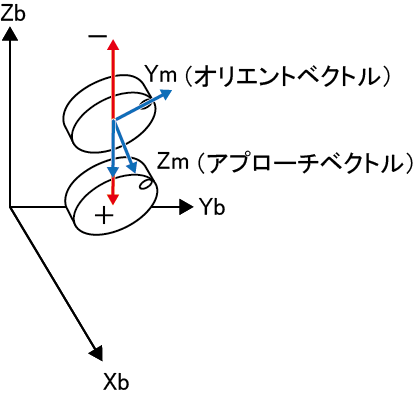 |
| Y± | 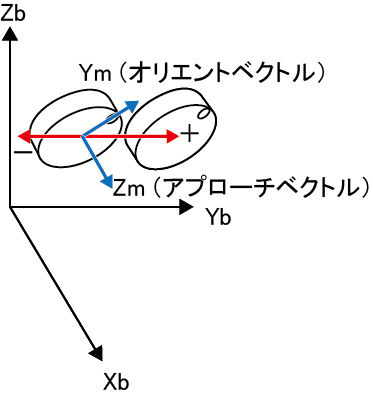 |
Y± | 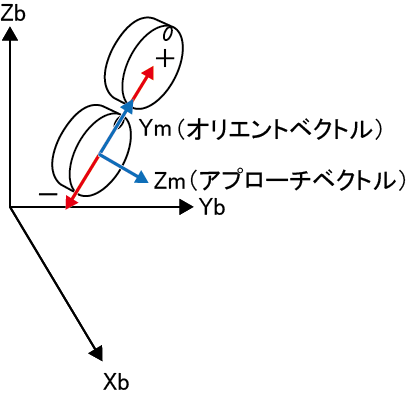 |
| Z± | 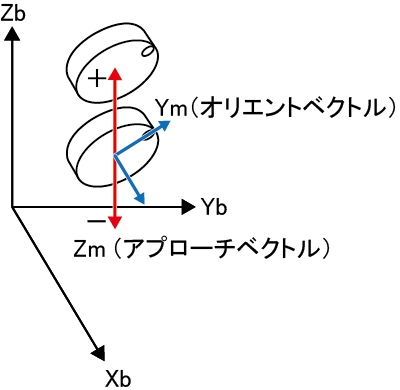 |
Z± | 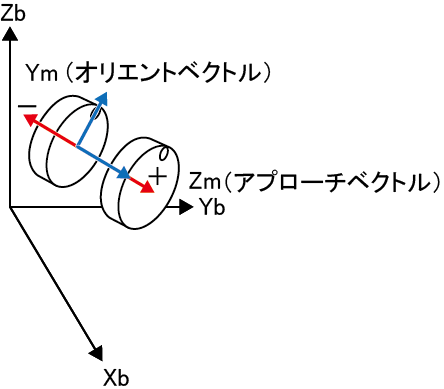 |
手動モードでの[RX]、[RY]、[RZ]キー操作
下図は、[RX]、[RY]、[RZ]キー操作による、2つの座標系での動作の違いを示します。
| X-Yモード(ベース座標系) | TOOLモード(メカニカルインタフェース座標系) | ||
|---|---|---|---|
| RX± | 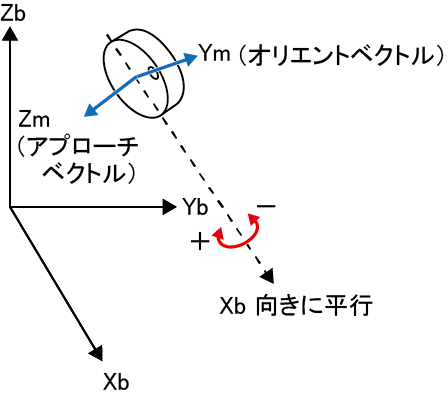 |
RX± | 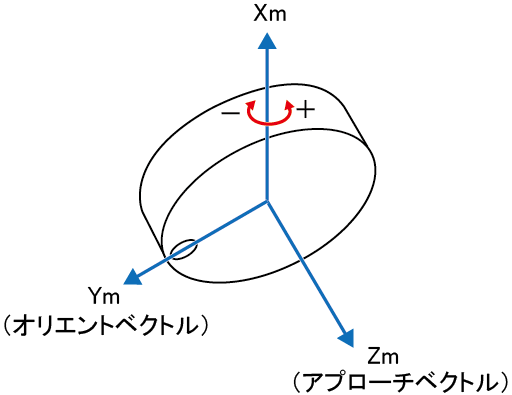 |
| RY± | 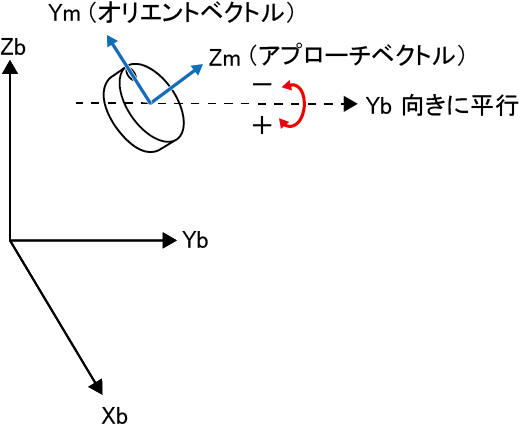 |
RY± | 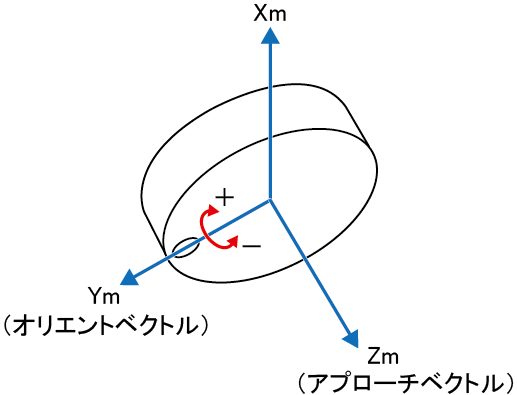 |
| RZ± | 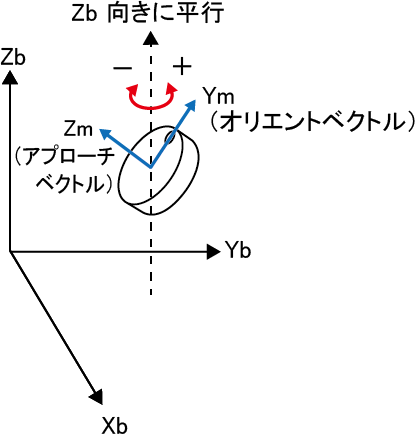 |
RZ± | 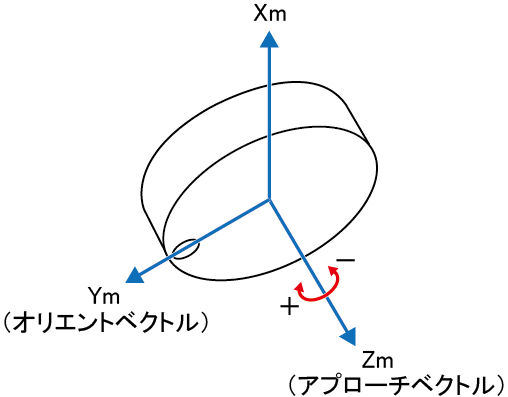 |
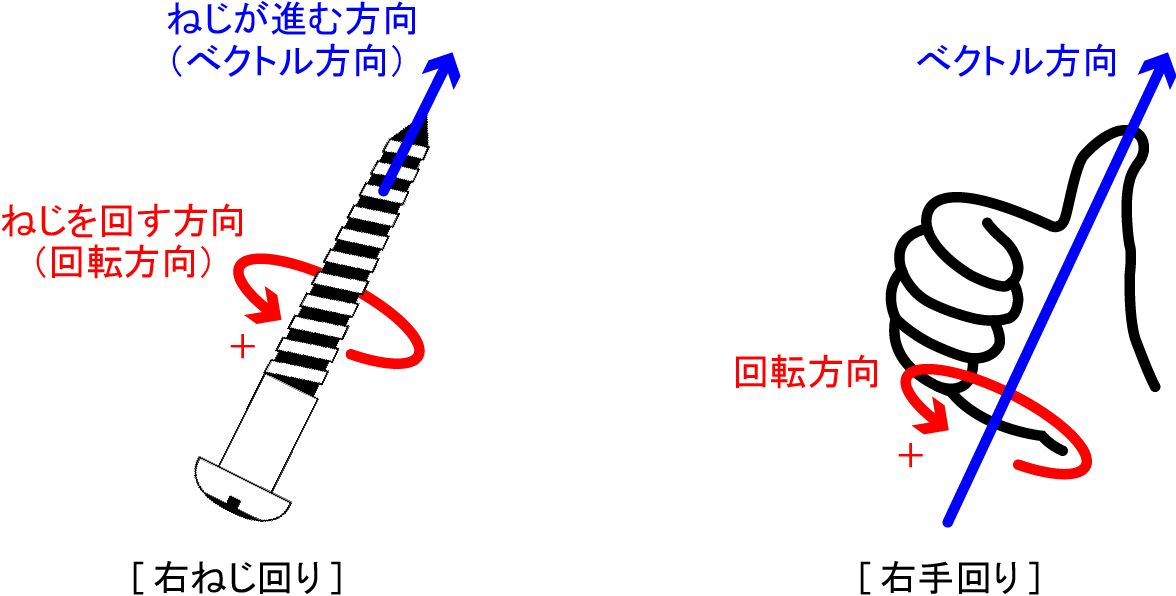
+-符号はベクトル方向に対して「右ねじ回り」が+です。
「右ねじ回り」とは、板にねじを差す場合、右回りに回すとねじが進んでいく原理をもとにしています。ここでは、ねじを差す方向がベクトル方向で、ねじを右回りに回す方向が回転方向になります。
また、「右ねじ回り」は「右手回り」と言い換えることができます。「右手回り」とは、右手を握り親指を立てます。親指が向いている方向がベクトル方向で、残りの指の方向が回転方向になります。
ID : 1942