
ID : 3315
電動ハンドと力センサを併用する場合の注意事項
電動ハンドと力センサ(コンプライアンス機能)を併用する場合、ロボットコントローラに下記の機器を装着する必要があります。
- 電動ハンドの制御
- 電動ハンドコントロールボード
- 力センサとの通信
- RS-422A通信ボードまたはRS-422Aマイクロコンバータ
ここで、"力センサとの通信"に使用する機器別の、注意事項があります。
RS-422A通信ボードを使用する場合の注意事項
電動ハンドコントロールボードとRS-422A通信ボードは、ともにPCIボードであるため、両方のボードを一つのロボットコントローラに装着できません。
また、EthernetとEtherCATを併用するロボットコントローラどうしの通信方法においては、マスターコントローラには、EtherCATマスターボード(PCIボード)を装着するため、電動ハンドコントロールボードとRS-422A通信ボードを装着できません。
したがって、電動ハンドコントロールボード2CHとRS-422A通信ボード(4チャネル品)を、別々のスレーブコントローラに装着します。
下図は、4台のロボットを連動させる場合において、すべてのロボットに、電動ハンドと力センサを取付ける場合の配線例です。
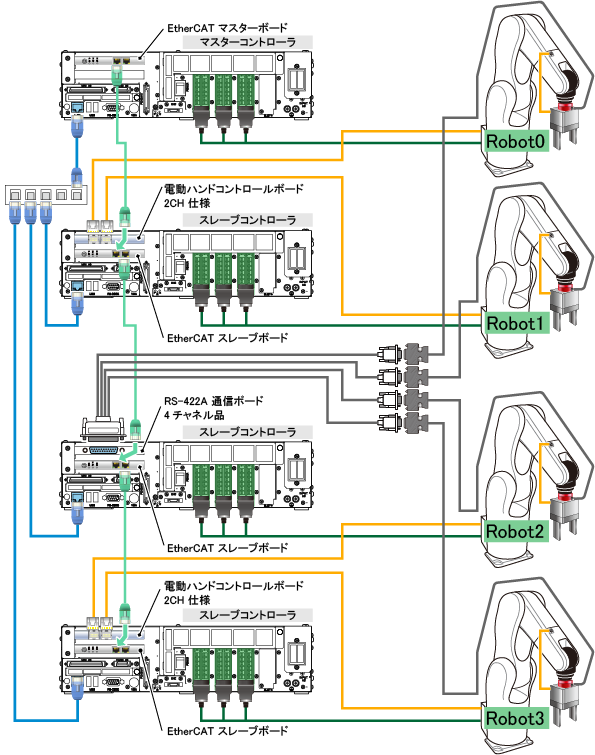
なお、各ボードの構成上、連動させるロボットの台数によって、併用可能な電動ハンドおよび力センサの最大数が異なります。
(力センサとの通信にRS-422Aマイクロコンバータを使用する場合は、連動させるロボットの台数分、電動ハンドおよび力センサを使用することができます。)
| 連動させるロボットの台数 | 併用可能な最大数 | |
|---|---|---|
| 電動ハンド | 力センサ | |
| 2 | 併用不可 | |
| 3 | 2 | 3 |
| 4 | 4 | 4 |
各スレーブコントローラに装着した電動ハンドコントロールボードおよびRS-422A通信ボードの制御は、マスターコントローラで行えます。各ボードの制御方法については、下記の参照先をご覧ください。
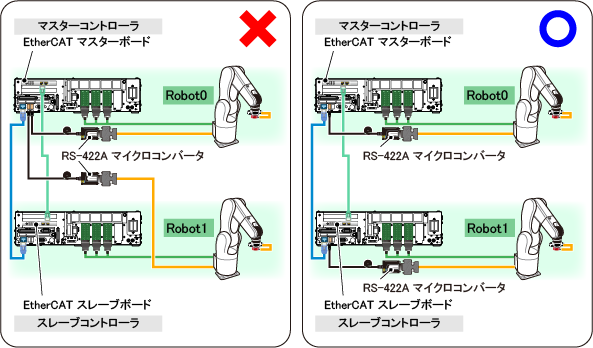
RS-422Aマイクロコンバータを使用する場合の注意事項
2つのRS-422Aマイクロコンバータを1台のロボットコントローラに接続し、そのうちの一つを別のロボットの力センサと通信させるような使い方は行わないでください。
必ず、ロボットコントローラ1台につき、1つのRS-422Aマイクロコンバータだけ接続して使用してください。
なお、RS-422Aマイクロコンバータを使用するには、接続後に各種設定が必要です。"協調機能での力センサの使い方"を参照してください。
また、電動ハンドに関する注意事項は、"電動ハンドを使用する場合の注意事項"を参照してください。
ID : 3315