
ID : 3314
力センサを使用する場合の注意事項
注意事項として、次の項目があります。
RS-422A通信ボードを使用する場合
力センサによるコンプライアンス機能を使用する場合は、RS-422A通信ボードか、RS-422Aマイクロコンバータをロボットコントローラに装着します。
力センサの通信方式はRS-422Aであり、その力センサの情報を、ロボットコントローラで受信するためです。
しかし、ロボットコントローラどうしの通信方法として、EthernetとEtherCATを併用する場合、マスターコントローラには、RS-422A通信ボードは装着できません(EtherCATマスターボードとRS-422A通信ボードがともにPCIボードであるため)。
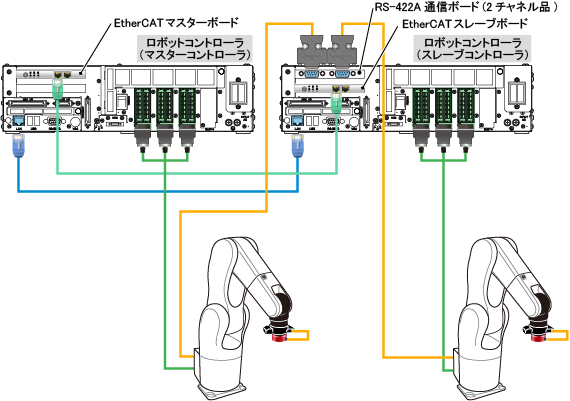
マスターコントローラにつながっているロボット(以降 Robot0)に取付けた力センサの情報を、RS-422A通信ボードに読み込むには、スレーブコントローラにRS-422A通信ボードを装着します。
下図は、2台のロボットを連動させる場合において、Robot0とRobot1の両方に力センサを取付ける場合の配線例です。
下図では、Robot0とRobot1の力センサから情報を読み込むため、RS-422A通信ボードの2チャネル品を使用しています。
3台以上のロボットを連動させる場合も、使用する力センサの数に応じて、各スレーブコントローラにRS-422A通信ボード(1チャネル品/2チャネル品/4チャネル品)を装着してください。
スレーブコントローラに装着したRS-422A通信ボードの制御は、マスターコントローラで行えます。RS-422A通信ボードの制御方法については"協調機能での力センサの使い方"を参照してください。
RS-422Aマイクロコンバータを使用する場合
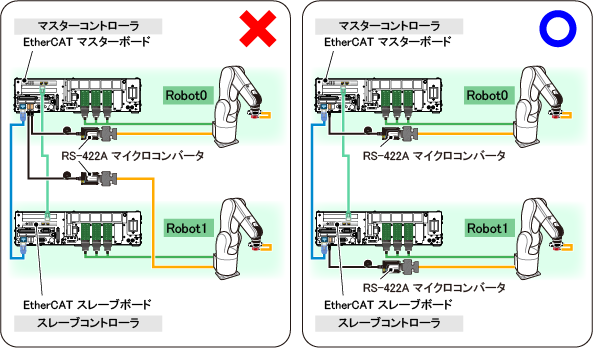
2つのRS-422Aマイクロコンバータを1台のロボットコントローラに接続し、そのうちの一つを別のロボットの力センサと通信させるような使い方は行わないでください。
必ず、ロボットコントローラ1台につき、1つのRS-422Aマイクロコンバータだけ接続して使用してください。
なお、RS-422Aマイクロコンバータを使用するには、接続後に各種設定が必要です。"協調機能での力センサの使い方"を参照してください。
ライセンスについて
力センサのライセンスは、いずれかのロボットコントローラ用のものを1つ用意していただくだけです。
1つのロボットコントローラにライセンスが登録されていれば、すべての力センサが使用できます。
ID : 3314